Altera CPRI IP Core User Manual
Page 198
E–20
Appendix E: Delay Measurement and Calibration
Single-Hop Delay Measurement
CPRI MegaCore Function
December 2013
Altera Corporation
User Guide
cycles of round-trip delay. The CPRI IP core adjusts the number of pipeline registers
the data passes through (in contrast to the number of registers it bypasses) to
compensate for mismatches between the desired round-trip delay programmed in the
cal_rtd
field, and the actual round-trip delay recorded in the
CPRI_ROUND_DELAY
register.
The
cal_status
field reports whether the CPRI IP core is successful in keeping the
round-trip delay at the value you prescribed in the
cal_rtd
field. The value of the
cal_status
bits should remain at 2’b11. If the value does not remain at 2’b11, you
should adjust the value in the
cal_rtd
field.Refer to
for the
full encoding of these status bits and how to determine whether to increase or
decrease the value of
cal_rtd
.
Initially, the number of pipeline registers the CPRI IP core uses is one half the total
number n of available register stages. This initial setting allows the CPRI IP core to
adjust the number up or down as required, and adds n/2+1 latency cycles to the Rx
path delay and the round-trip delay. The number of available register stages is five
and the default number of register stages of delay is three.
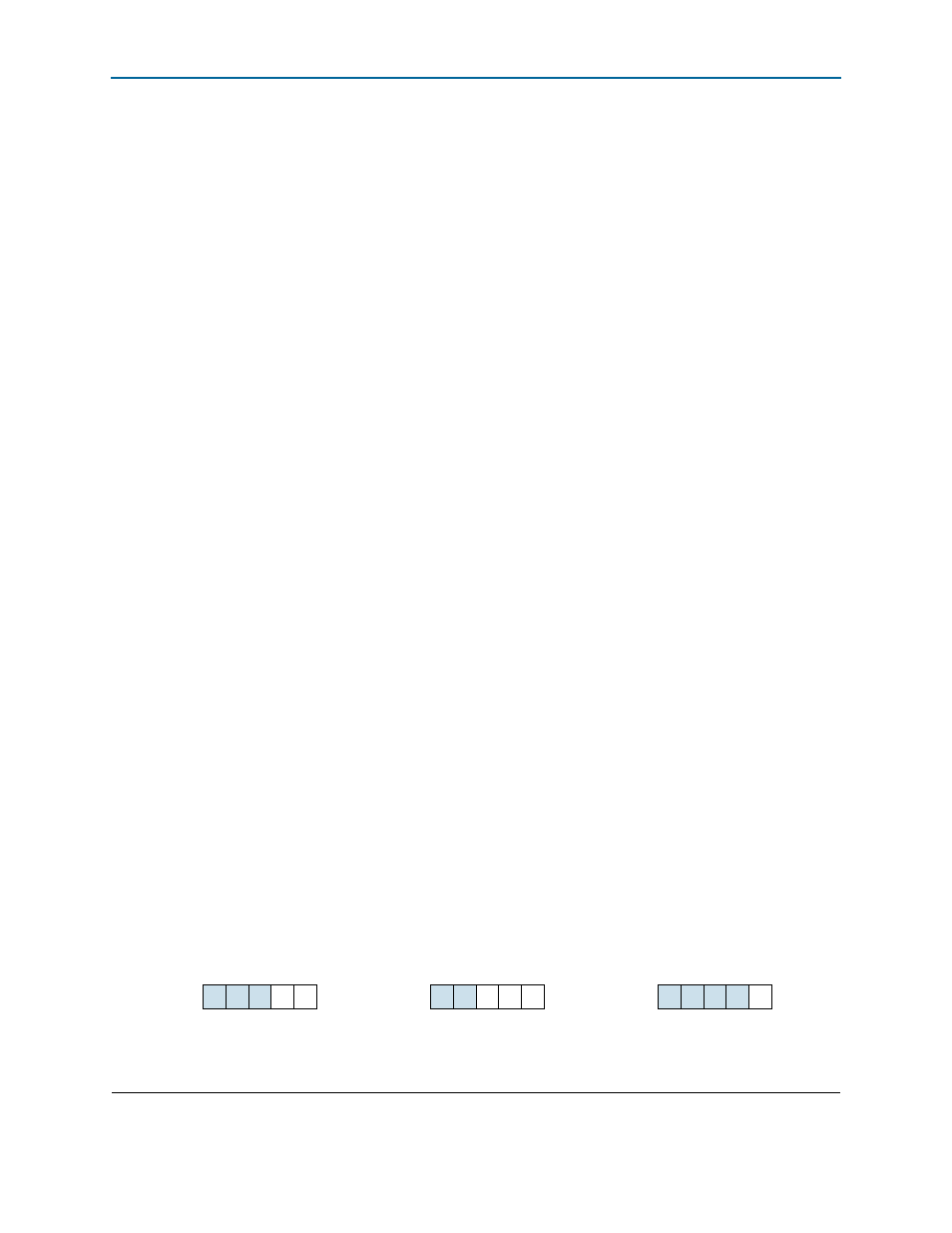
Figure E–7
shows two example behaviors of the autocalibration feature. In the
examples, the CPRI IP core changes the value of the pipeline read pointer in response
to a change in the measured actual round-trip delay through the IP core.
Figure E–7
shows the CPRI IP core in the following three states:
1. In the initial state, the CPRI IP core sets the read pointer for the pipeline registers
to the middle register.
2. In Case 1, the application writes the value of 60 in the
cal_rtd
field. When the
CPRI IP core measures the actual round-trip delay and sets the
rx_round_trip_delay
field in the
CPRI_ROUND_DELAY
register to the value of 61, the
CPRI IP core responds by moving the read pointer to decrease the pipeline length,
and therefore the measured round-trip delay value, by one
cpri_clkout
cycle. The
adjustment achieves the desired effect: the measured round-trip delay value
changes to 60.
3. In Case 2, the application writes the value of 62 in the
cal_rtd
field, instead. When
the CPRI IP core measures the actual round-trip delay and sets the
rx_round_trip_delay
field in the
CPRI_ROUND_DELAY
register to the value of 61, the
CPRI IP core responds by moving the read pointer to increase the pipeline length,
and therefore the measured round-trip delay value, by one
cpri_clkout
cycle. The
adjustment achieves the desired effect: the measured round-trip delay value
changes to 62.
Figure E–7. Round-Trip Delay Autocalibration Examples
Initial state:
Case 1:
Case 2:
Measured RTD = 61
Measured RTD = 61
cal_rtd = 60
cal_rtd = 62
1
2
3
4
5
1
2
3
4
5
1
2
3
4
5
—>
—>
—>
Rd pointer at 3
Rd pointer decrements to 2
Rd pointer increments to 4
—> Measured RTD = 60
—> Measured RTD = 62