Yaskawa L1000E AC Drive CIMR-LEA User Manual
Page 90
4 Start-Up Programming
90
YASKAWA TOEPYAIL1E01A YASKAWA AC Drive L1000E Quick Start Guide
■
S1-26: Emergency Stop Start Level
Sets the Emergency Stop Start Level as a percentage of the Maximum Output Frequency. This setting is available when
the control mode is set to Closed Loop Vector Control (A1-02 = 3) or Closed Loop Vector Control for PM Motors (A1-02
= 7) and the stopping method is set to Elevator Emergency Stop (b1-03 = 4).
The drive coasts to a stop after the Up/Down command is cleared and when the value of U1-05 (Speed Feedback) is equal
to or greater than the value of S1-26 (Emergency Stop Start Level).
The drive ramps to a stop after the Up/Down command is cleared and when the value of U1-05 (Speed Feedback) is lower
than the value of S1-26 (Emergency Stop Start Level).
■
S2-01: Motor Rated Speed
Sets the rated speed of the motor.
■
S2-02/S2-03: Slip Compensation Gain in Motoring Mode / Regenerative Mode
Slip compensation for leveling speed can be set separately for motoring and regenerative states to help improve the
accuracy of leveling.
■
S2-05: Slip Compensation Torque Detection Delay Time
Sets a delay time before detecting torque for slip compensation.
■
S2-06: Slip Compensation Torque Detection Filter Time Constant
Sets the filter time constant applied to the torque signal used for the slip compensation value calculation.
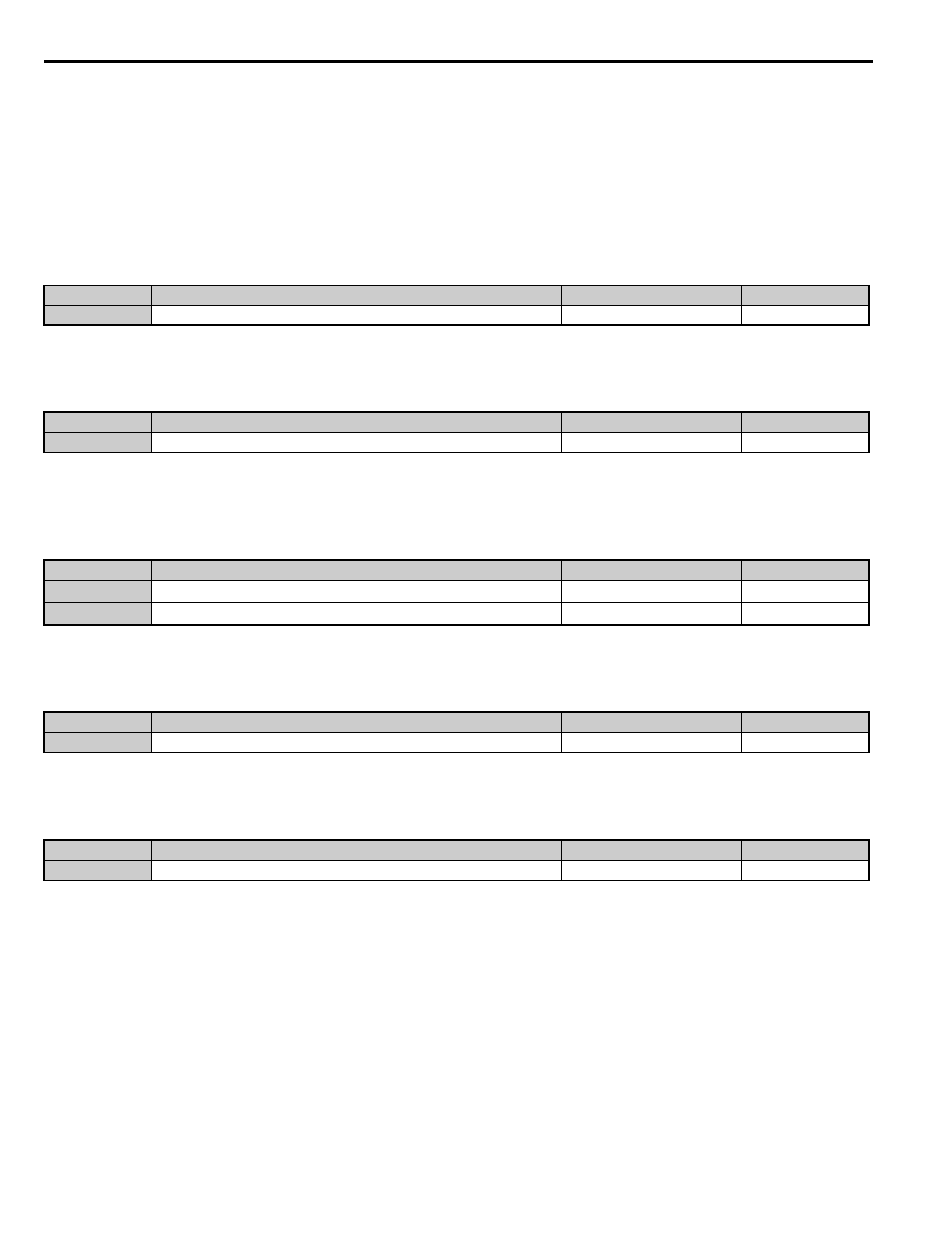
No.
Parameter Name
Setting Range
Default
S1-26
Emergency Stop Start Level
0.0 to 100.0%
10.0%
No.
Parameter Name
Setting Range
Default
S2-01
Motor Rated Speed
300 to 1800 rpm
1380 rpm
No.
Parameter Name
Setting Range
Default
S2-02
Slip Compensation Gain in Motoring Mode
0.0 to 5.0
0.7
S2-03
Slip Compensation Gain in Regenerative Mode
0.0 to 5.0
1.0
No.
Parameter Name
Setting Range
Default
S2-05
Slip Compensation Torque Detection Delay Time
0 to 10000 ms
1000 ms
No.
Parameter Name
Setting Range
Default
S2-06
Slip Compensation Torque Detection Filter Time Constant
0 to 2000 ms
500 ms