B parameter table – Yaskawa L1000E AC Drive CIMR-LEA User Manual
Page 191
B Parameter Table
YASKAWA TOEPYAIL1E01A YASKAWA AC Drive L1000E Quick Start Guide
191
Pa
ra
me
te
r T
abl
e
B
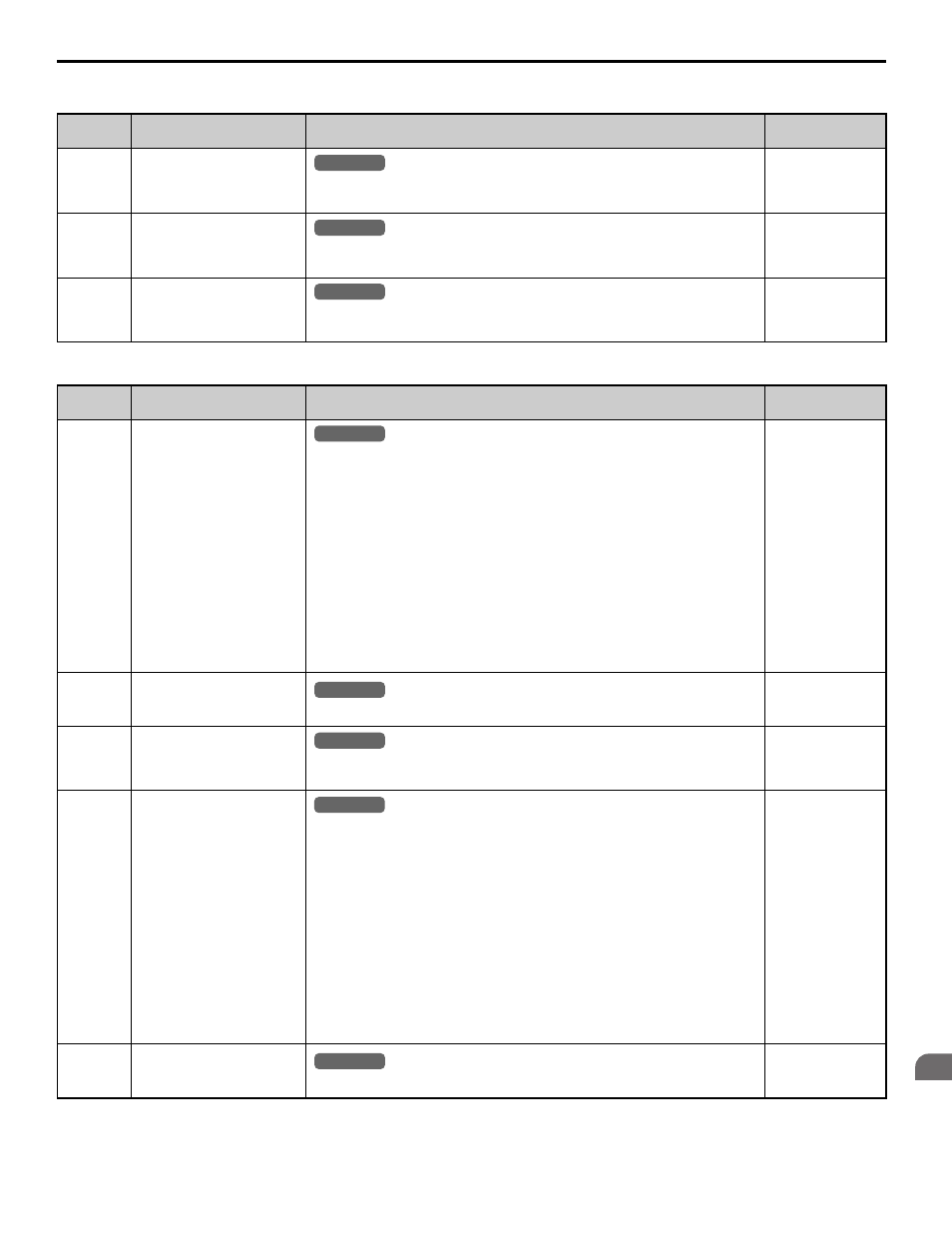
L5: Automatic Fault Reset
L6: Torque Detection
No.
(Addr.)
Name
Description
Setting
L5-01
(49EH)
Number of Auto Reset
Attempts
Sets the number of times the drive may attempt to reset after the following faults
occur: GF, LF, oC, ov, rr, oH1, oL1, oL2, oL3, oL4, UL3, UL4.
Default: 0
Min: 0
Max: 10
L5-02
(49FH)
Fault Output Operation
during Auto Reset
0: Fault output not active.
1: Fault output active during reset attempt.
Default: 0
Min: 0
Max: 1
L5-06
(522H)
Undervoltage Fault Reset
Selection
0: Same as L5-01 condition
1: Always automatically reset UV1
Default: 0
Min: 0
Max: 1
No.
(Addr.)
Name
Description
Setting
L6-01
(4A1H)
Torque Detection Selection 1
0: Disabled
1: oL3 detection only active during speed agree, operation continues after
detection
2: oL3 detection always active during run, operation continues after detection
3: oL3 detection only active during speed agree, output shuts down on an oL3
fault
4: oL3 detection always active during run, output shuts down on an oL3 fault
5: UL3 detection only active during speed agree, operation continues after
detection
6: UL3 detection always active during run, operation continues after detection
7: UL3 detection only active during speed agree, output shuts down on an oL3
fault
8: UL3 detection always active during run, output shuts down on an oL3 fault
Default: 0
Min: 0
Max: 8
L6-02
(4A2H)
Torque Detection Level 1
Sets the overtorque and undertorque detection level.
Default: 150%
Min: 0%
Max: 300%
L6-03
(4A3H)
Torque Detection Time 1
Sets the time an overtorque or undertorque condition must exist to trigger torque
detection 1.
Default: 0.1 s
Min: 0.0 s
Max: 10.0 s
L6-04
(4A4H)
Torque Detection Selection 2
0: Disabled
1: oL4 detection only active during speed agree, operation continues after
detection
2: oL4 detection always active during run, operation continues after detection
3: oL4 detection only active during speed agree, output shuts down on an oL4
fault
4: oL4 detection always active during run, output shuts down on an oL4 fault
5: UL4 detection only active during speed agree, operation continues after
detection
6: UL4 detection always active during run, operation continues after detection
7: UL4 detection only active during speed agree, output shuts down on an oL4
fault
8: UL4 detection always active during run, output shuts down on an oL4 fault
Default: 0
Min: 0
Max: 8
L6-05
(4A5H)
Torque Detection Level 2
Sets the overtorque and undertorque detection level.
Default: 150%
Min: 0%
Max: 300%
All Modes
common
_
All Modes
common
_
All Modes
common
_
All Modes
common
_
All Modes
common
_
All Modes
common
_
All Modes
common
_
All Modes
common
_