4 start-up programming – Yaskawa L1000E AC Drive CIMR-LEA User Manual
Page 122
4 Start-Up Programming
122
YASKAWA TOEPYAIL1E01A YASKAWA AC Drive L1000E Quick Start Guide
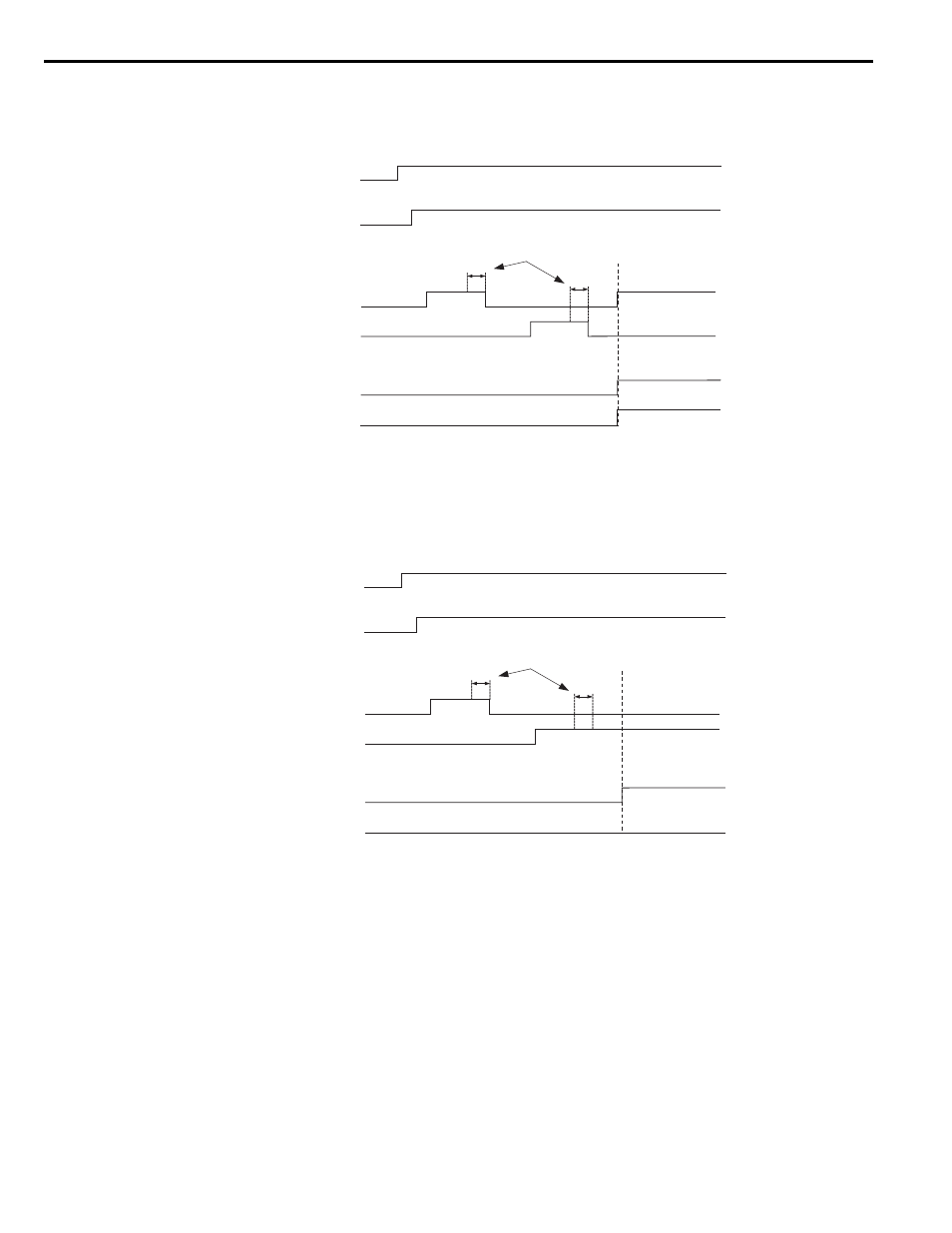
• When the lightest load direction is up, the drive stops after Light Load Direction Search and then accelerates upwards to
the Rescue Operation speed set in parameter d1-25. The output terminals set for “Light Load Direction” (H2-
= 54)
and “Light Load Direction detection status”(H2-
= 55) will close.
Figure 72
Figure 79 Light Load Direction Detection (Up)
• When the lightest direction is down, then after Light Load Direction Detection is finished the drive immediately
accelerates to the Rescue Operation speed set in d1-25 without stopping. An output terminal set for “Light load
direction” (H2-
= 54) will stay open, and an output terminal set for “Light Load Direction detection status”(H2-
= 55) will close.
Figure 73
Figure 80 Light Load Direction Detection (Down)
H1-
غغ = 55
(Rescue Operation)
Up
Off (open)
Off (open)
Up
Down
Speed agree torque calculations
Elevator moves in the
direction of the light load
Up/Down command
Up command (internal)
Down command (internal)
On (closed)
On (closed)
㧔Light Load Direction Search status㧕
H2-
= 55
㧔Light load direction㧕
H2-
= 54
Off (open)
Off (open)
On (closed)
On (closed)
H1-
غغ = 55
(Rescue Operation)
Up
Off (open)
Off (open)
Down
Speed agree torque calculations
Elevator moves in the
direction of the light load
Up/Down command
Up command (internal)
Down command (internal)
On (closed)
On (closed)
㧔Light Load Direction Search status㧕
H2-
= 55
㧔Light load direction㧕
H2-
= 54
Off (open)
Off (open)
On (closed)