Data blocks for controlling clamp position, Data blocks for controlling ejector position – Rockwell Automation 1771-QDC PLASTIC MOLD.MODULE User Manual
Page 71
2–5
Command Word/Bit Descriptions
Publication 1771-6.5.88 – July 1997
After you configure the QDC module with a valid MCC, the module
determines if it has access to ram (screw) position data from the ram
(screw) position sensor. The module considers these command
blocks recognizable and can return these status blocks when it has an
analog input reserved for a ram (screw) position sensor, and the
sensor is physically connected to input 1.
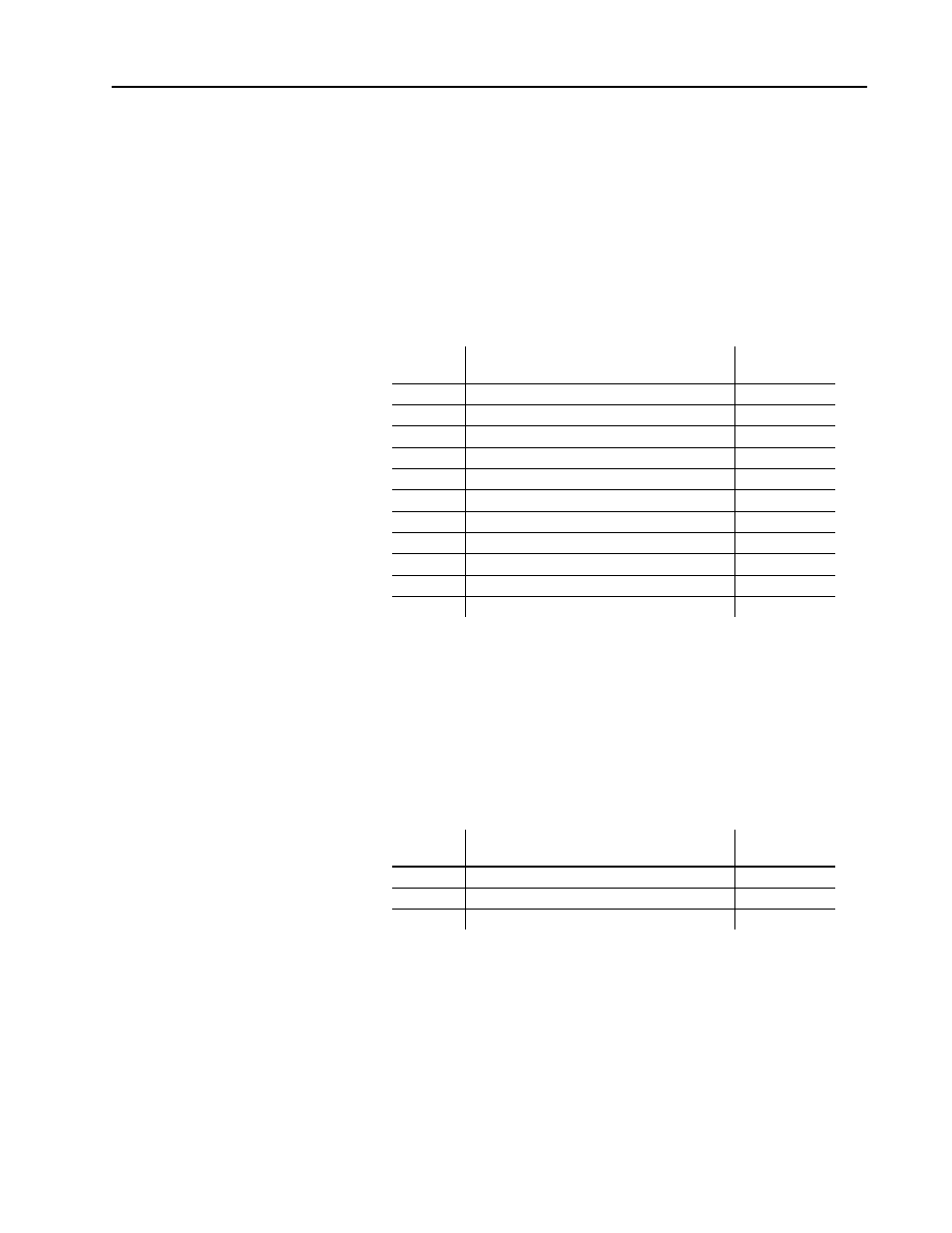
The host processor can write any of these command blocks to the
QDC module to control clamp position
Command
Block
Description
Corresponding
Status Block
FCC
First Clamp Close Configuration Block
–
SCC
Second Clamp Close Configuration Block
–
TCC
Third Clamp Close Configuration Block
–
LPC
Clamp Low Pressure Close Configuration Block
–
CPC
Clamp Close Profile Block
CPS
FOC
First Clamp Open Configuration Block
–
SOC
Second Clamp Open Configuration Block
–
TOC
Third Clamp Open Configuration Block
–
OSC
Clamp Open Slow Configuration Block
–
OPC
Clamp Open Profile Block
OPS
CLC
Clamp and Eject ERC Values Block
CLS
After you configure the QDC module with a valid MCC, the module
determines if it has access to clamp position data from the clamp position
sensor. The module considers these command blocks recognizable and
can return these status blocks when it has an analog input reserved for a
clamp position sensor, and the sensor is physically connected to input 3.
The host processor can write any of these command blocks to the QDC
module to control ejector position:
Command
Block
Description
Corresponding
Status Block
EAC
Ejector Advance Configuration Block
–
ERC
Ejector Retract Configuration Block
–
EPC
Ejector Profile Block
EPS
After you configure the QDC module with a valid MCC, the module
determines if it has access to clamp and ejector position data from
both position sensors. The module considers these command blocks
recognizable and can return the status block when it has analog
inputs reserved for ejector position and clamp position sensors, and
both sensors are physically connected to inputs 3 and 4 respectively.
Data Blocks for
Controlling Clamp
Position
Data Blocks for
Controlling Ejector
Position