Par 488, Par 500 – Rockwell Automation 20D PowerFlex 700S AC Drives with Phase II Control Programming Manual User Manual
Page 88
88
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Chapter 2
Programming and Parameters
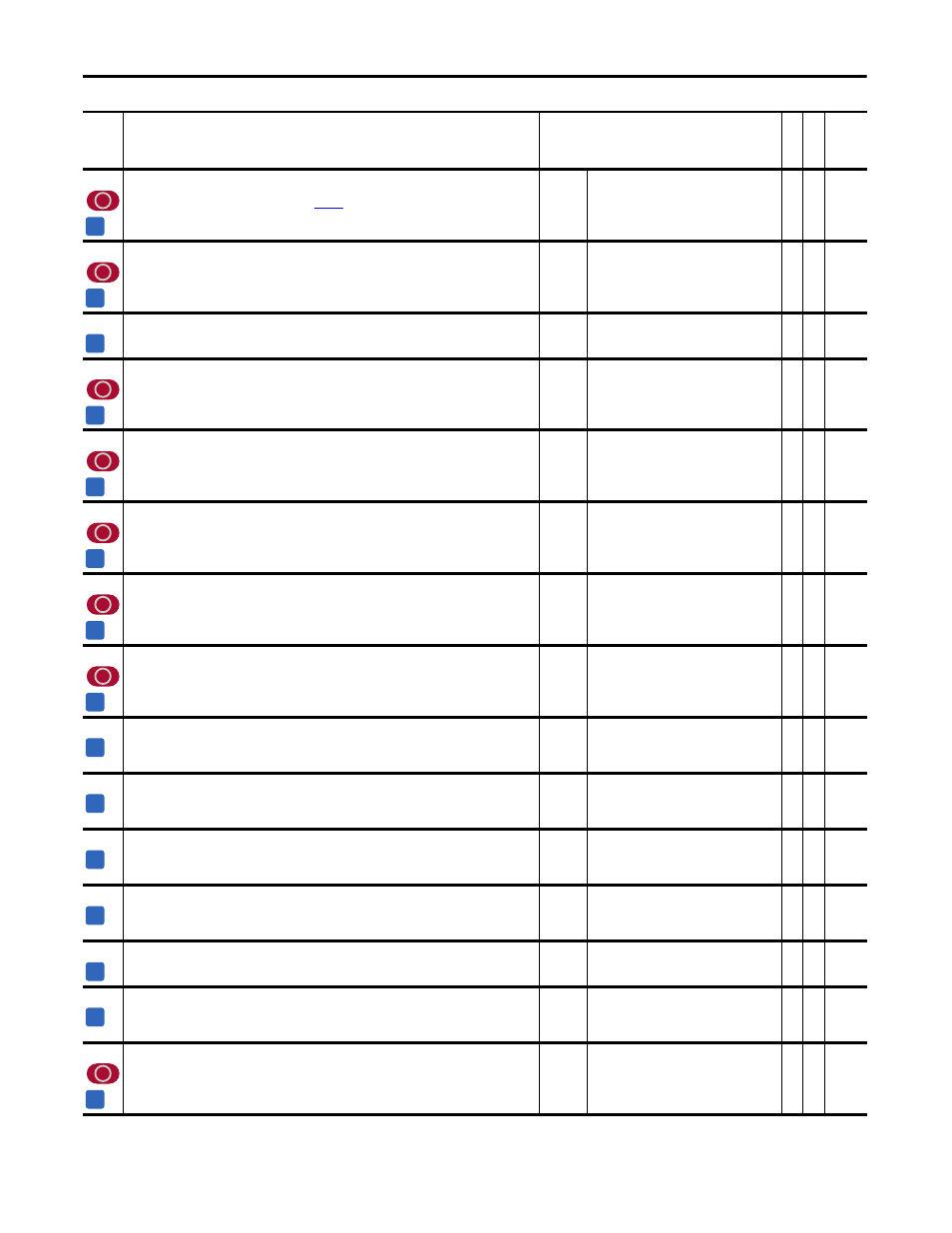
487
Motor NTC Coef
Defines a coefficient used to calculate the rotor temperature from the measured stator temperature. Used only
in Field Oriented Control - 2 (FOC2) mode. See Par
[Motor Ctrl Mode].
Default:
Min/Max:
Units:
100
50/200
%
RW 16-bit
Integer
488 Flux
Current
Specifies the magnetizing current that produces rated flux in the motor in a per unit (percent representation).
Measured by the auto-tune procedure. Do not change this value.
Default:
Min/Max:
Units:
Scale:
30.00
0.00/75.00
%
x 100
RW 16-bit
Integer
489
Flx CurFdbk (Id)
Displays flux producing (d-axis) current feedback.
Default:
Min/Max:
Units:
0.0000
-/+8.0000 P.U.
P.U.
RO
Real
490 StatorInductance
Displays the sum of the stator and cable inductances of the motor in per unit (percent representation), as
determined by the auto-tune procedure. Scaled to percent of rated motor impedance. Do not change this
value.
Note: the default value was changed from 8192 to 4096 for firmware version 3.001.
Default:
Min/Max:
Units:
Scale:
100.0
0.00/799.99
%
100 = 4096
RW 16-bit
Integer
491 StatorResistance
Displays the sum of the stator and cable resistances of the motor in per unit (percent representation), as
determined by the auto-tune procedure. Scaled to percent of rated motor impedance. Do not change this
value.
Default:
Min/Max:
Units:
Scale:
1.00
0.00/100.00
%
100 = 8192
RW 16-bit
Integer
492 Leak
Inductance
Displays the sum of the motor stator and rotor leak inductance, and motor cable inductances in per unit
(percent representation), as determined by the auto-tune procedure. Scaled to percent of rated motor
impedance. Do not change this value.
Default:
Min/Max:
Units:
Scale:
20.00
0.00/100.00
%
100 = 8192
RW 16-bit
Integer
493
Leak Indc Satur1
Displays the leakage inductance correction for the first overload level as determined by the autotune
procedure.
Default:
Min/Max:
Units:
100.00
25.00/100.00
%
RW 16-bit
Integer
494
Leak Indc Satur2
Displays the leakage inductance correction for the first overload level as determined by the auto-tune
procedure.
Default:
Min/Max:
Units:
100.00
25.00/100.00
%
RW 16-bit
Integer
495 Iqs
Command
Displays the torque producing (q-axis) current command.
Default:
Min/Max:
Units:
Scale:
0.0
-/+800.0
%
x 10
RO
16-bit
Integer
496 Ids
Command
Displays the flux producing (d-axis) current command.
Default:
Min/Max:
Units:
Scale:
0.0
-/+800.0
%
x 10
RO
16-bit
Integer
497 Vqs
Command
Displays the command for initiation of voltage on the torque producing axis (q-axis).
Default:
Min/Max:
Units:
Scale:
0
-/+200
%
100 = 8192
RO
16-bit
Integer
498 Vds
Command
Displays the command for initiation of voltage on the flux producing axis (d-axis).
Default:
Min/Max:
Units:
Scale:
0
-/+200
%
100 = 8192
RO
16-bit
Integer
499 Trq
CurFdbk
(Iq)
Displays torque producing (q-axis) current feedback.
Default:
Min/Max:
Units:
0.0000
-/+8.0000
P.U.
RO
Real
500
Bus Util Limit
Sets the maximum allowed bus voltage utilization for the Motor Control. Do not change this value. Higher
values may result in control instability or over-current faults.
Default:
Min/Max:
Units:
Scale:
90.0
0.0/100.0
%
100 = 8192
RW 16-bit
Integer
501
Torque En Dly
Sets the delay between the time the drive is enabled and the time the Motor Control applies torque.
Default:
Min/Max:
Units:
Scale:
100
0/32767
ms
100 = 8192
RW 16-bit
Integer
No.
Name
Description
Values
Link
able
Re
ad
-Write
Da
ta
T
yp
e
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A