Rockwell Automation 20D PowerFlex 700S AC Drives with Phase II Control Programming Manual User Manual
Page 100
100
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Chapter 2
Programming and Parameters
670
671
672
673
674
677
678
679
680
681
Logic Mask
Determines which adapters can control the drive.
Start Mask
Controls which adapters can issue start commands.
Jog Mask
Controls which adapters can issue jog commands.
Direction Mask
Controls which adapters can issue forward/reverse direction commands.
Fault Clr Mask
Controls which adapters can clear a fault.
Stop Owner
Indicates which adapter are currently issuing a valid stop command.
Start Owner
Indicates which adapter are currently issuing a valid start command.
Jog Owner
Indicates which adapter are currently issuing a valid jog command.
Direction Owner
Indicates which adapter is currently has exclusive control of direction changes.
Fault Clr Owner
Indicates which adapter is currently clearing a fault.
684
MotnUpdatePeriod
The servo update period for the servo axis (drive).
Default:
Min/Max:
Unit:
2000
1/999999
μ
s
RO 32-bit
Integer
685
Motn CoarseMulti
Number of
[MotnUpdatePeriod] comprising one Course Update Period from the Motion Period.
Default:
Min/Max:
4
2/16
RO 32-bit
Integer
686
Motn Config
Configuration bits pertaining to Motion-related functions for the Servo axis.
687
Motn Axis Status
Status bits pertaining to Motion-related functions for the Servo axis.
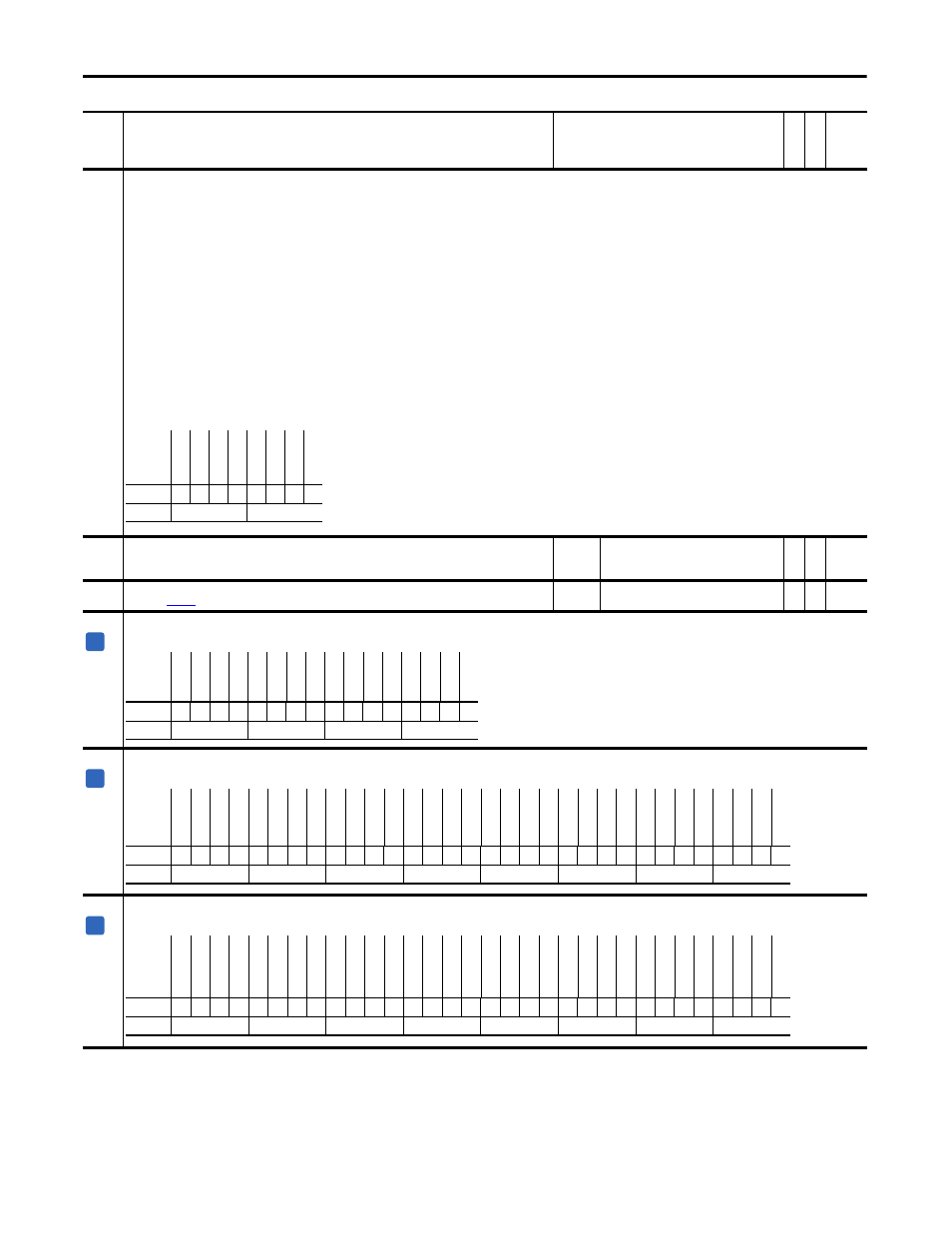
688
Motn AxisControl
Command request bits from the Motion Planner both the Servo and Feedback Only axis.
No.
Name
Description
Values
Link
able
Re
ad
-Write
Da
ta
T
yp
e
Options
Dr
iv
eL
og
ix
Re
se
rv
ed
In
t D
PI C
onn
Re
se
rv
ed
Au
x DP
I C
on
n
Ex
t DPI C
onn
Lo
ca
l H
IM
Te
rm
in
al
B
lk
Default
1
1
1
1
1
1
1
1
Bit
7
6
5
4
3
2
1
0
0 = False
1 = True
A
Options
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Hrd O
vr
Tr
vl
Sf
t O
vr T
rvl
Po
la
rit
y N
eg
Default
x
x
x
x
x
x
x
x
x
x
x
x
x
0
0
0
Bit
15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
0 = False
1 = True
A
Options
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
AxisSh
td
wnC1
Re
se
rv
ed
Re
se
rv
ed
Chng Ref
Re
se
rv
ed
Re
se
rv
ed
Course Updt
CST Updt Err
-Hr
d O
vr
Tr
vl
+H
rd O
vr
Tr
vl
-Sf
t O
vr
Tr
vl
+Sf
t O
vr
Tr
vl
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Po
si
t Lo
ck
AxisShut
do
wn
Dr
v E
nab
le
Motn A
ction
Default
x
x
x
x
x
x
x
x
x
x
x
x
x
0
x
x
0
x
x
0
0
0
0
0
0
x
x
x
0
0
0
0
Bit
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
0 = False
1 = True
A
Options
ChngC
m
dRefC1
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Ab
rt
E
vnt
C
1
Ab
rt
Ho
m
e C
1
Re
se
rv
ed
Shut
do
w
n C1
Re
se
rv
ed
ChngC
m
dRefC0
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Ab
rt
E
vnt
C
0
Ab
rt
Ho
m
e C
0
Re
se
rv
ed
Shut
do
w
n C0
Re
se
rv
ed
Default
0
x
x
x
x
x
x
x
x
x
x
0
0
x
0
x
0
x
x
x
x
x
x
x
x
x
x
0
0
x
0
x
Bit
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
0 = False
1 = True