Motor overload, Setting parameter 338 [mtr i2t spd min – Rockwell Automation 20D PowerFlex 700S AC Drives with Phase II Control Programming Manual User Manual
Page 166
166
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Appendix B
Application Notes
5.
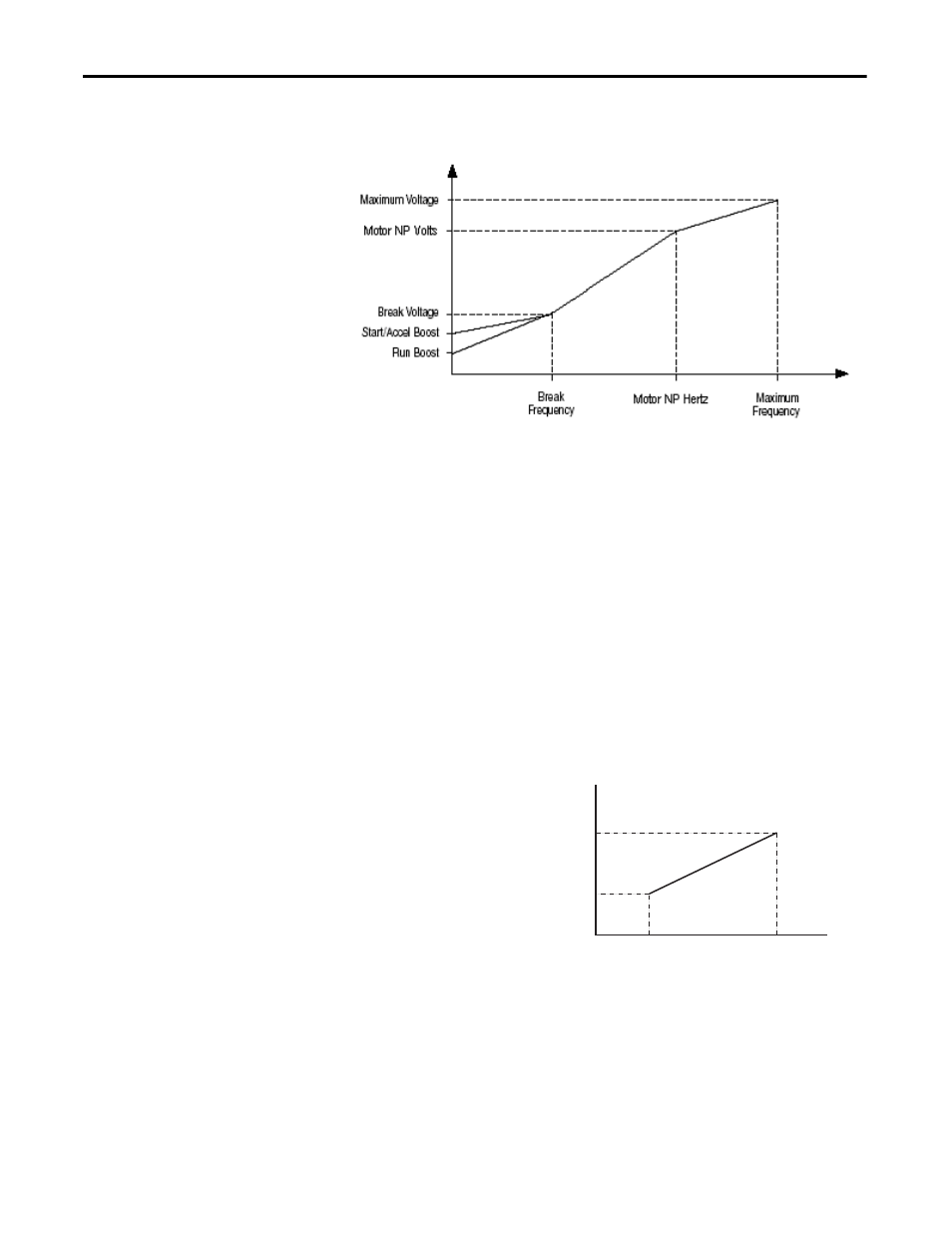
Parameters 531 [Maximum Voltage] and 532 [Maximum Freq] slope that
portion of the curve used above base speed.
Motor Overload
Setting Parameter 338 [Mtr I2T Spd Min]
Parameter 338 [Mtr I2T Spd Min] sets the minimum speed for the motor
overload (I
2
T) function. This value determines the minimum speed the drive
should run below the minimum current threshold set in parameter 337 [Mtr I2T
Curr Min]. Parameters 338 [Mtr I2T Spd Min] and 337 [Mtr I2T Curr Min] set
the first current/speed breakpoint. From this point the current threshold is linear
to the value specified by the motor service factor set in parameter 336 [Motor OL
Factor]. Set this parameter to the minimum value for the motor overload trip to
vary in time at low speeds.
Figure 3 - Motor Overload Curve When Par 338 [Mtr I2T Spd Min] Is Less Than 1.0
P336 [Motor OL Factor]
C
urrent
P337 [Mtr I2T Curr Min]
Speed
P338 [Mtr I2T Spd Min]
Base Speed (1.0)
When motor current exceeds the value of the
curve, the motor overload output integrates. A
motor overload exception event occurs when the
value of the motor overload output reaches 1.0.
The value of the motor overload output is visible
in
Par 330 [Fault TP Data] when the value of Par 329
[Fault TP l] equals 13.