Rockwell Automation 20D PowerFlex 700S AC Drives with Phase II Control Programming Manual User Manual
Page 101
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
101
Programming and Parameters
Chapter 2
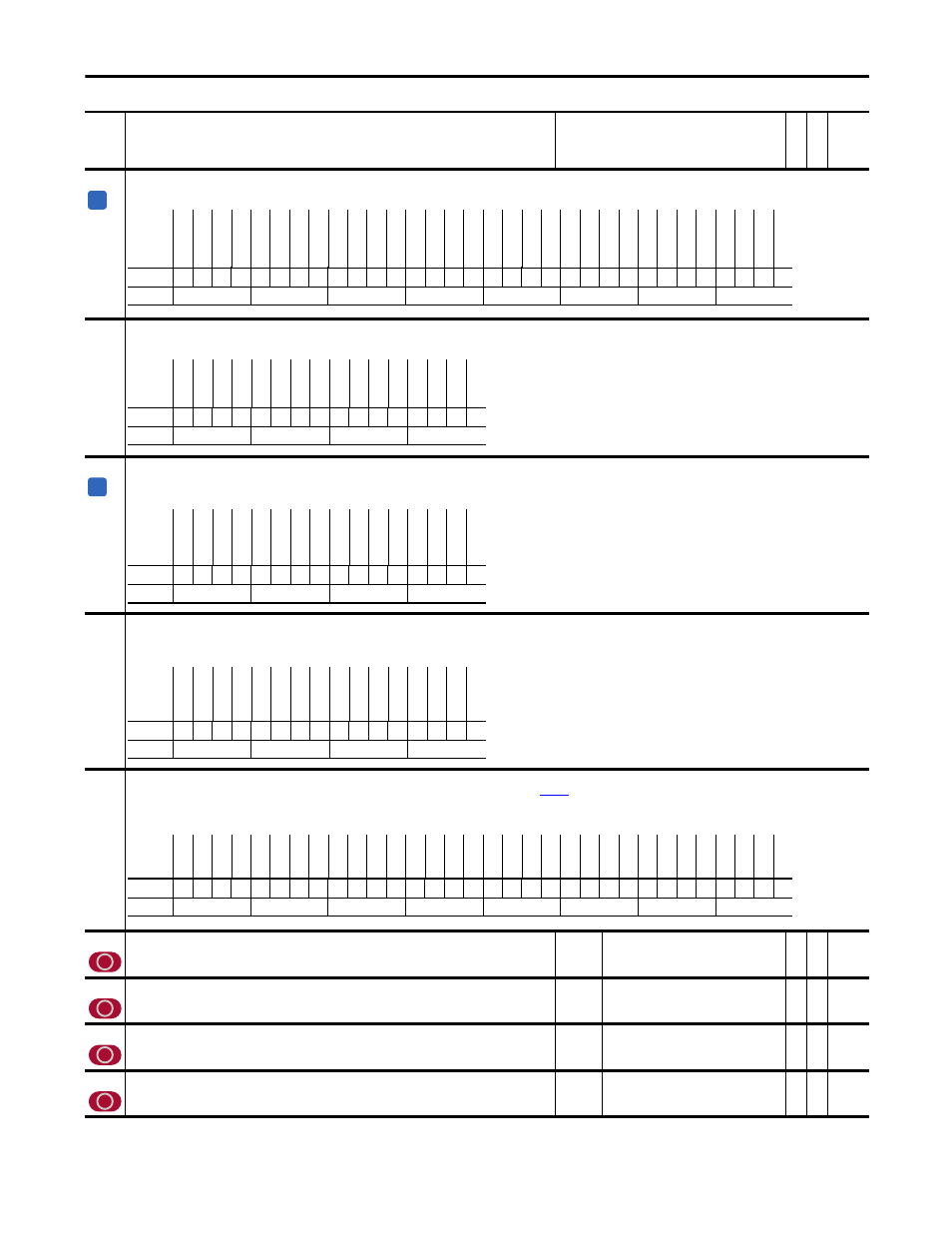
689
Motn Axis Resp
Command response from both the Servo and Feedback Only Axis to the Motion Planner.
690
Motn Cnct Status
Status of all Motion connections. Also includes status for the configuration state relating to motion connections.
691
Motn EventStatus
Status of all events supported by the Motion Event Connection.
Note: Added bit 9 “Watch Fb Arm” and bit 10 “WatchFbPosit” for firmware version 3.003.
692
Motn Event Ctrl
Shows configuration state of Motion Event functions.
Note: Added bit 7 “Watch Fb Rev” for firmware version 3.003.
693
Interp SynchInput
Bit zero of this parameter is used as the synchronization pulse for the Interpolator. This parameter is linked to
[Motn Posit Sync] for a Motion Servo Axis. It is linked to “Xsync Status” for a
SynchLink application.
Bits 1 - 4 have been changes to “Reserved” for firmware version 2.004.
694
Motn Mx Pos Trvl
Positive soft overtravel threshold for the Motion Servo Axis.
Default:
Min/Max:
0
-/+2147483648
RW 32-bit
Integer
695
Motn Mx Neg Trvl
Negative soft overtravel threshold for the Motion Servo Axis.
Default:
Min/Max:
0
-/+2147483648
RW 32-bit
Integer
696
Motn PositErrTol
Position error tolerance for the Motion Servo Axis.
Default:
Min/Max:
4096
0/2147483648
RW 32-bit
Integer
697
Motn PositLock Tol
Position lock tolerance for the Motion Servo Axis.
Default:
Min/Max:
0
0/2147483648
RW 32-bit
Integer
No.
Name
Description
Values
Link
able
Re
ad
-Write
Da
ta
T
yp
e
A
Options
Chng
Po
sRefC1
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Abr
t E
vn
t C
1
Abr
t H
ome C1
Re
se
rv
ed
Shut
do
w
n C1
Re
se
rv
ed
Chng
X
Ref
C0
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Abr
t E
vn
t C
0
Abr
t H
ome C0
Re
se
rv
ed
Shut
do
w
n C0
Re
se
rv
ed
Default
0
x
x
x
x
x
x
x
x
x
x
0
0
x
0
0
0
x
x
x
x
x
x
x
x
x
x
0
0
x
0
x
Bit
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
0 = False
1 = True
Options
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
MSO Input
Dr
iv
e Re
ad
y
Asynch C
nc
t
Ev
en
t C
nc
t
Sy
nch C
nc
t
Us
er
IO
C
nc
t
Co
nf
ig
O
K
Default
x
x
x
x
x
x
x
x
x
0
0
0
0
0
0
0
Bit
15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
0 = False
1 = True
A
Options
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Wa
tc
hF
bP
os
it
Wa
tc
h F
b
Ar
m
Re
se
rv
ed
Hom
e
Hom
e A
rm
Re
gis
2 P
osi
t
Re
gis
2 X
Ar
m
Re
gis
1 P
osi
t
Re
gis
1 X
Ar
m
Wa
tc
h P
os
it
Wa
tc
h X
A
rm
Default
x
x
x
x
x
0
0
x
0
0
0
0
0
0
0
0
Bit
15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
0 = False
1 = True
Options
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Hom
e A
xi
s
Ev
en
t C
nd
t
Hom
e T
ype 1
Hom
e T
ype 0
Wn
dw
R
eg
is
2
Wn
dw
R
eg
is
1
Wa
tc
h X
R
ev
Default
x
x
x
x
x
x
x
x
x
0
0
0
0
0
0
0
Bit
15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
0 = False
1 = True
Options
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Sy
nc
Pu
ls
e
Default
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
0
Bit
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
0 = False
1 = True