Par 90, Or output, Par 101 – Rockwell Automation 20D PowerFlex 700S AC Drives with Phase II Control Programming Manual User Manual
Page 38
38
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Chapter 2
Programming and Parameters
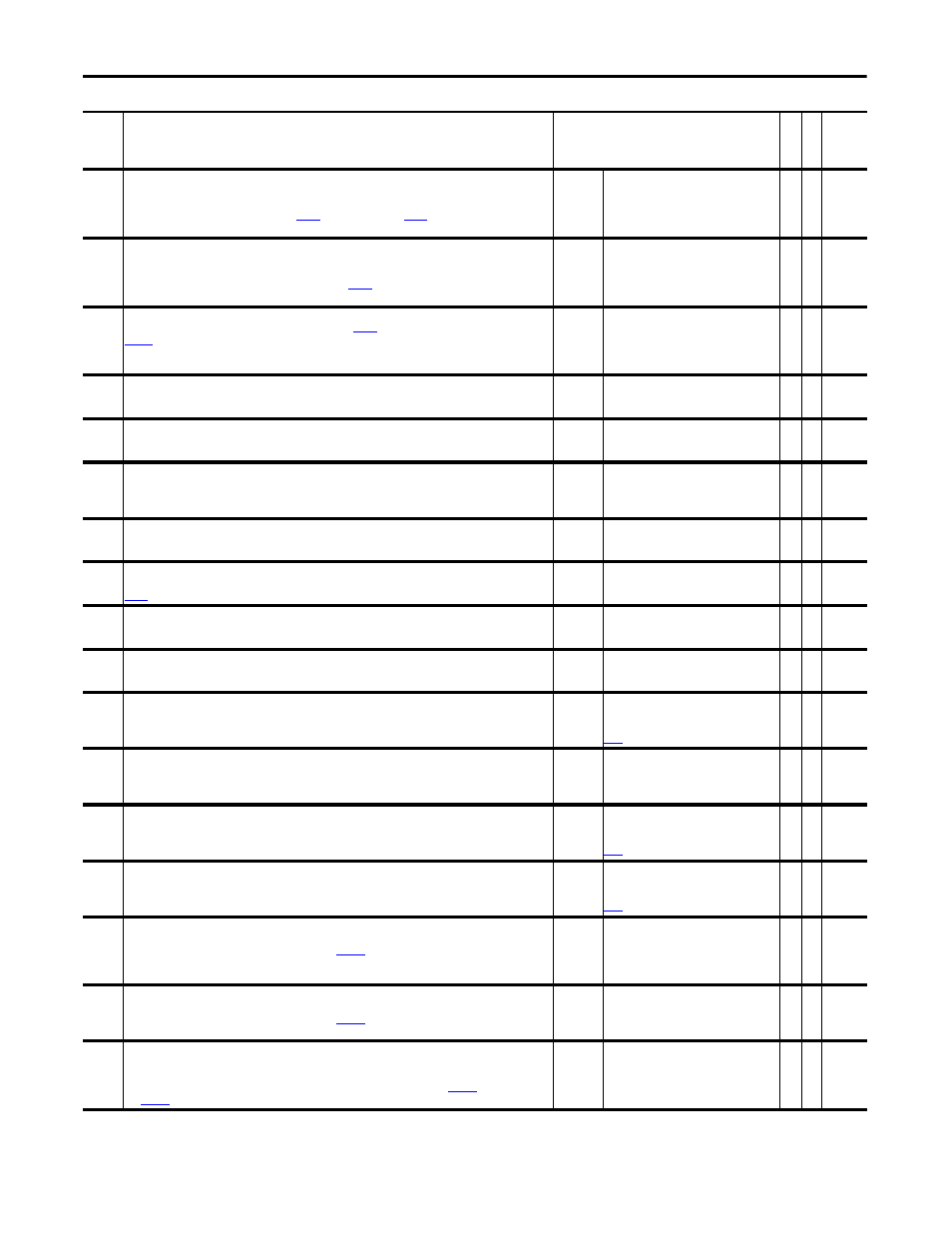
90
Spd Reg BW
Sets the bandwidth of the speed regulator in rad/sec. Bandwidth is also referred to as the crossover frequency.
Small signal time response is approximately 1/BW and is the time to reach 63% of set point. A change to this
parameter will cause an automatic update of
[Spd Reg P Gain] and
[Spd Reg I Gain]. To disable the
automatic gain calculation, set this parameter to a value of zero.
Default:
Min/Max:
Units:
10.0000
0.0000/500.0000
rad/s
Y
RW Real
91
Spd Reg Damping
Sets the damping factor of the drive's characteristic equation and factors in the calculation of the integral gain. A
damping factor of 1.0 is considered critical damp. Lowering the damping will produce faster load disturbance
rejection, but may cause a more oscillatory response. When
[Spd Reg BW] is set to zero, damping factor has
no effect.
Default:
Min/Max:
1.0000
0.5000/3.0000
Y
RW Real
92
SpdReg P Gain Mx
Places a limit on the maximum value of proportional gain in
[Spd Reg P Gain] and
[Srlss Spd Reg Kp]. When gains are automatically calculated, this parameter is necessary to limit the
amplification of noise with increased inertia.
Note: The Max. value was increased from 600.0000 for firmware version 3.001.
Default:
Min/Max:
100.0000
0.0000/3000.0000
Y
RW Real
93
SRegFB Filt Gain
Sets the lead term for the speed feedback filter. Values greater than 1 will result in a lead function and values less
than 1 will result in a lag function. A value of 1 will disable the filter.
Default:
Min/Max:
1.0000
-5.0000/20.0000
Y
RW Real
94
SReg FB Filt BW
Sets the frequency for the Speed Feedback filter.
Default:
Min/Max:
Units:
35.0000
0.0000/3760.0000
rad/s
Y
RW Real
95
SRegOut FiltGain
Sets the lead term for the Speed Regulator output filter. Values greater than 1 will result in a lead function and
values less than 1 will result in a lag function. A value of 1 will disable the filter.
Note: The default value for this parameter was changed from 0.7000 to 1.0000 for firmware version 2.003.
Default:
Min/Max:
1.0000
-/+5.0000
Y
RW Real
96
SReg Out Filt BW
Sets the frequency for the Speed Regulator output filter.
Default:
Min/Max:
Units:
30.0000
0.0000/3760.0000
rad/s
Y
RW Real
97
Act Spd Reg BW
Displays the actual speed regulator bandwidth or crossover frequency. The value represents the bandwidth in
[Spd Reg BW] after the maximum bandwidth limits have been applied.
Default:
Min/Max:
Units:
10.0000
0.0000/500.0000
rad/s
RO Real
98
Slip RPM @ FLA
Sets the amount of compensation to drive output at motor full load current (FLA).
Note: This parameter was added for firmware version 2.003.
Default:
Min/Max:
Units:
Based on [Motor NP RPM]
0.0/1200.0 rpm
rpm
Y
RW 16-bit
Integer
99
Slip Comp Gain
Sets the response time of slip compensation.
Note: This parameter was added for firmware version 2.003.
Default:
Min/Max:
Units:
40.0
1.0/100.0
rad/s
Y
RW 16-bit
Integer
100
Speed Error
The error (difference) between the motor speed reference (+) and the filtered motor speed feedback (–).
Default:
Min/Max:
Units:
Scale:
0.0000
-/+14112.0000
rpm
[Motor NP RPM] = 1.0 P.U.
RO Real
101
SpdReg Integ Out
The output value of the Speed Regulator Integral channel.
Default:
Min/Max:
Units:
Scale:
0.0000
-/+8.0000 P.U.
P.U.
1.0 P.U. Torque
RO Real
102
Spd Reg Pos Lim
Sets the positive limit of the Speed Regulator output value. The output of the Speed Regulator is limited by
adjustable high and low limits.
Default:
Min.Max:
Units:
Scale:
3.0000
0.0000/6.0000
P.U.
[Motor NP RPM] = 1.0 P.U.
Y
RW Real
103
Spd Reg Neg Lim
Sets the negative limit of the Speed Regulator output value. The output of the Speed regulator is limited by
adjustable high and low limits.
Default:
Min/Max:
Units:
Scale:
-3.0000
-6.0000/0.0000
P.U.
[Motor NP RPM] = 1.0 P.U.
Y
RW Real
104
SrLss Spd Reg Kp
Sets the proportional gain of the Speed Regulator when sensorless motor speed feedback is used. This value is
automatically calculated based on the bandwidth set in
[Srlss Spd Reg BW]. Proportional gain may be
manually adjusted by setting Par 106 to zero. This gain setting has no units (per unit torque) / (per unit speed
error).
Default:
Min/Max:
8.0000
0.0000/200.0000
Y
RW Real
105
SrLss Spd Reg Ki
Sets the integral gain of the Speed Regulator when sensorless motor speed feedback is used. This value is
automatically calculated based on the bandwidth set in
[Srlss Spd Reg BW]. Integral gain may be
manually adjusted by setting Par 106 to zero. Units are '/s' (per unit torque/sec) / (per unit speed error).
Default:
Min/Max:
Units:
8.0000
0.0000/4095.8000
/s
Y
RW Real
106
SrLss Spd Reg BW
Sets the bandwidth of the Speed Regulator when sensorless motor speed feedback is used. Bandwidth is also
referred to as the crossover frequency. Small integral time response is approximately 1/BW and is the time to
reach 63% of set point. A change to this parameter will cause an automatic update of
[Srlss Spd Reg Kp]
[Srlss Spd Reg Ki]. To disable the automatic gain calculation, set this parameter to zero.
Default:
Min/Max:
Units:
10.0000
0.0000/30.0000
rad/s
Y
RW Real
No.
Name
Description
Values
Link
able
Re
ad
-Write
Da
ta
T
yp
e