Par 47 – Rockwell Automation 20D PowerFlex 700S AC Drives with Phase II Control Programming Manual User Manual
Page 35
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
35
Programming and Parameters
Chapter 2
40
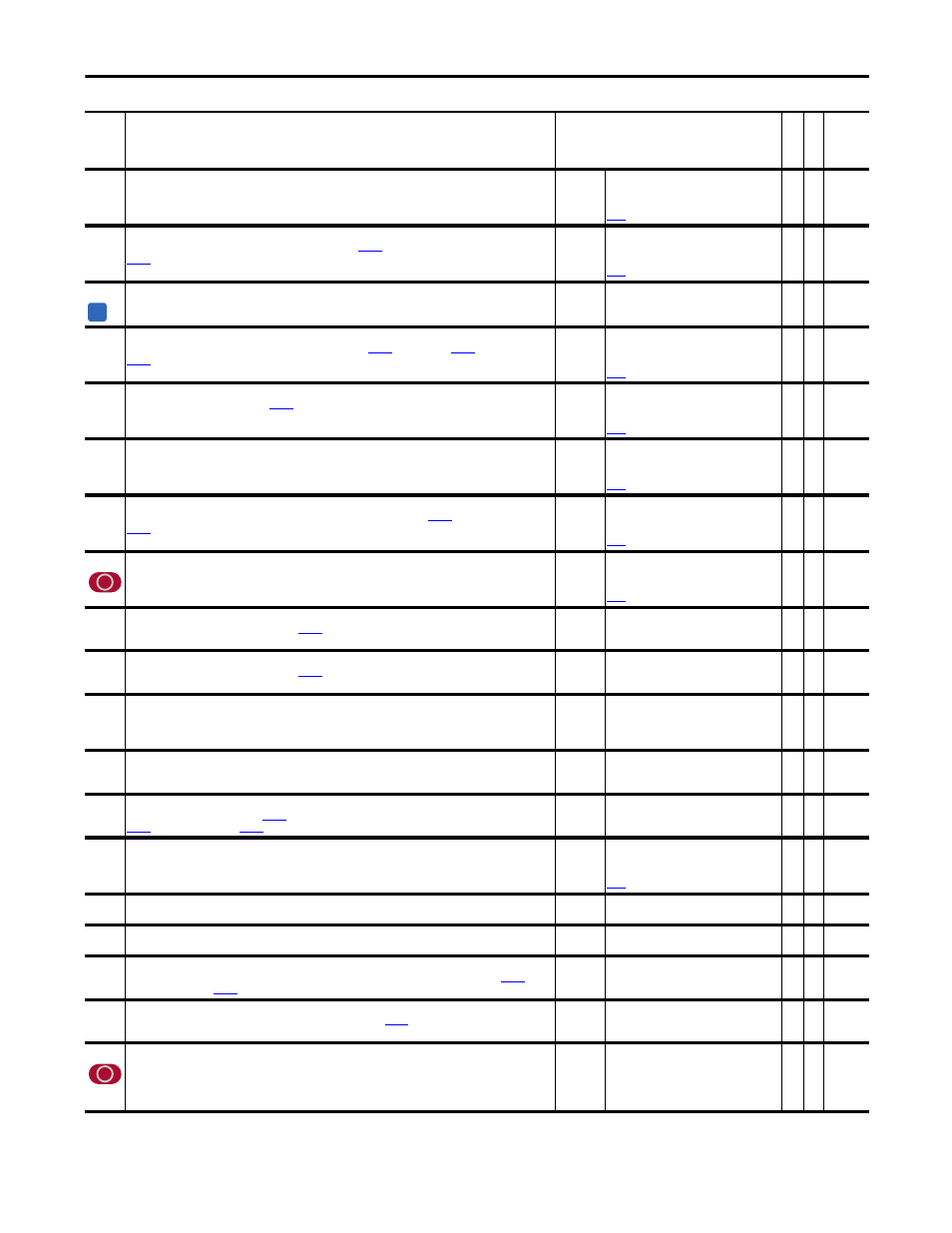
Selected Spd Ref
Displays the speed command before the speed reference limit block.
Default:
Min/Max:
Units:
Scale:
0.0000
-/+8.0000 P.U.
rpm
[Motor NP RPM] = 1.0 P.U.
RO Real
41
Limited Spd Ref
Displays the speed command after the limit block, limited by
[Min Spd Ref Lim] and
[Max Spd Ref Lim].
Default:
Min/Max:
Units:
Scale:
0.0000
-/+8.0000 P.U.
rpm
[Motor NP RPM] = 1.0 P.U.
RO Real
42 Jerk
Allows you to adjust the amount of S-Curve or "Jerk" applied to the Accel/Decel rate.
Note: This parameter was added for firmware version 2.003.
Default:
Min/Max:
900
2/30000
RW 16-bit
Integer
43
Ramped Spd Ref
Displays the speed command after the ramp block, modified by
[Decel Time 1] and
[S Curve Time].
Default:
Min/Max:
Units:
Scale:
0.0000
-/+8.0000 P.U.
rpm
[Motor NP RPM] = 1.0 P.U.
RO Real
45
Delayed Spd Ref
One sample period delayed output of
[Ramped Spd Ref]. Used in some applications to synchronize the
speed reference value through SynchLink. This master drive Par 43 [Ramped Spd Ref] would then be transmitted
to the slave drives over SynchLink.
Default:
Min/Max:
Units:
Scale:
0.0000
-/+14112.0000
rpm
[Motor NP RPM] = 1.0 P.U.
RO Real
46
Scaled Spd Ref
Displays the speed command after scaling.
Default:
Min/Max:
Units:
Scale:
0.0000
-/+14112.0000
rpm
[Motor NP RPM] = 1.0 P.U.
RO Real
47
SpdRef + Spd Trm1
Displays the final speed command used by the Speed Regulator. It is the sum of
[Scaled Spd Ref] and
[Speed Trim 1].
Default:
Min/Max:
Units:
Scale:
0.0000
-/+8.0000 P.U.
rpm
[Motor NP RPM] = 1.0 P.U.
RO Real
48
Spd Ref Bypass2
The speed command after the limit, ramp and s-curve blocks. Link a source directly to this parameter to bypass
these blocks.
Default:
Min/Max:
Units:
Scale:
0.0000
-/+8.0000 P.U.
rpm
[Motor NP RPM] = 1.0 P.U.
Y
RW Real
49
Selected SpdRefA
Used to view the value of Speed Reference A,
[Speed Ref A Sel] from a Human Interface Module (HIM).
Note: This parameter is new for firmware version 3.001.
Default:
Min/Max:
Units:
0.0000
-/+8.0000
rpm
RO Real
50
Selected SpdRefB
Used to view the value of Speed Reference B,
[Speed Ref B Sel] from a HIM.
Note: This parameter is new for firmware version 3.001.
Default:
Min/Max:
Units:
0.0000
-/+8.0000
rpm
RO Real
53
Drive Ramp Rslt
Displays the speed reference value, after the limit function. This is the input to the error calculator and speed
regulator. Available for use in peer-to-peer data links (DPI interface). This number is scaled so that rated motor
speed will read 32768.
Default:
Min/Max:
0
-/+262144
RO 32-bit
Integer
54
Inertia TrqLpfBW
Sets the bandwidth of the inertia compensation torque output low pass filter. A value of 0.0 will disable the filter.
Note: This parameter is new for firmware version 3.001.
Default:
Min/Max:
Units:
35.0000
0.0000 /2000.0000
rad/s
Y
RW Real
55
Speed Comp
Displays the derivative or change in
[Inertia SpeedRef] on a per second basis. Link this parameter to
[Speed Trim 3] and set
[SpdTrim 3 Scale] to 0.002 to reduce position error in following applications.
Default:
Min/Max:
Units:
0.0000
-/+2200000000.0000
/s
RO Real
56
Inertia SpeedRef
The speed input of the inertia compensator. Link this parameter to the output of an internal ramp or s-curve
block. The inertia compensator generates a torque reference that is proportional to the rate of change of speed
input and total inertia.
Default:
Min/Max:
Units:
Scale:
0.0000
-/+14112.0000
rpm
[Motor NP RPM] = 1.0 P.U.
Y
RW Real
57
InertiaAccelGain
Sets the acceleration gain for the Inertia Compensation function. A value of 1 produces 100% compensation.
Default:
Min/Max:
1.0000
1.0000/2.0000
Y
RW Real
58
InertiaDecelGain
Sets the deceleration gain for the Inertia Compensation function. A value of 1 produces 100% compensation.
Default:
Min/Max:
1.0000
1.0000/2.0000
Y
RW Real
59
Inertia Trq Add
The torque reference output generated by the inertia compensator. This torque level is modified by
[InertiaAccelGain] and
[InertiaDecelGain]. A value of 1.0 represents rated torque of the motor.
Default:
Min/Max:
Units:
1.0000
-/+8.0000 P.U.
P.U.
RO Real
60
DeltaSpeedScale
Multiplier in the Inertia Compensation function - affects the value of
[Inertia Trq Add]. Use in center winder
and unwind applications to compensate for roll diameter build-up.
Default:
Min/Max:
1.0000
-/+1000.0000
Y
RW Real
61
Virt Encoder EPR
Equivalent Edges Per Revolution (EPR) or line count of a virtual encoder. A virtual encoder is a position reference
whose input comes from speed reference. It accumulates pulses at the same rate as a real encoder of identical
Pulses Per Revolution (PPR). Enter the equivalent PPR. For example, enter 1024 PPR to match an encoder with
1024 EPR.
Default:
Min/Max:
Units:
4096
10/67108864
EPR
RW 32-bit
Integer
No.
Name
Description
Values
Link
able
Re
ad
-Write
Da
ta
T
yp
e
A