Par 79, Par 78 – Rockwell Automation 20D PowerFlex 700S AC Drives with Phase II Control Programming Manual User Manual
Page 37
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
37
Programming and Parameters
Chapter 2
78
Spd Ref TP RPM
Displays the value selected in
[Spd Ref TP Sel] in rpm. This display should only be used if the selected value
is floating point data.
Default:
Min/Max:
Units:
Scale:
0.0000
-/+8.0000
rpm
[Motor NP RPM] = 1.0 P.U.
RO Real
79
Spd Ref TP Data
Displays the value selected in
[Spd Ref TP Sel]. This display should only be used if the selected value is
integer data.
Default:
Min/Max:
0
-/+32768
RO 16-bit
Integer
81
Spd Reg P Gain
Sets the proportional gain of the speed regulator. This value is automatically calculated based on the bandwidth
setting in
[Spd Reg BW]. Proportional gain may be manually adjusted by setting Par 90 [Spd Reg BW] to a
value of zero. Units are (per unit torque) / (per unit speed).
The maximum value for Par 81 [Spd Reg P Gain] = Par 90 [Spd Reg BW] x
[Total Inertia]
Note: The Max. value was increased from 600.0000 for firmware version 3.001.
Default:
Min/Max:
20.0000
0.0000/3000.0000
Y
RW Real
82
Spd Reg I Gain
Sets the integral gain of the speed regulator. This value is automatically calculated based on the bandwidth
setting in
[Spd Reg BW]. Integral gain may be manually adjusted by setting Par 90 [Spd Reg BW] to a value
of zero. Units are (per unit torque/sec) / (per unit speed).
Default:
Min/Max:
Units:
50.0000
0.0000/100000.0000
/s
Y
RW Real
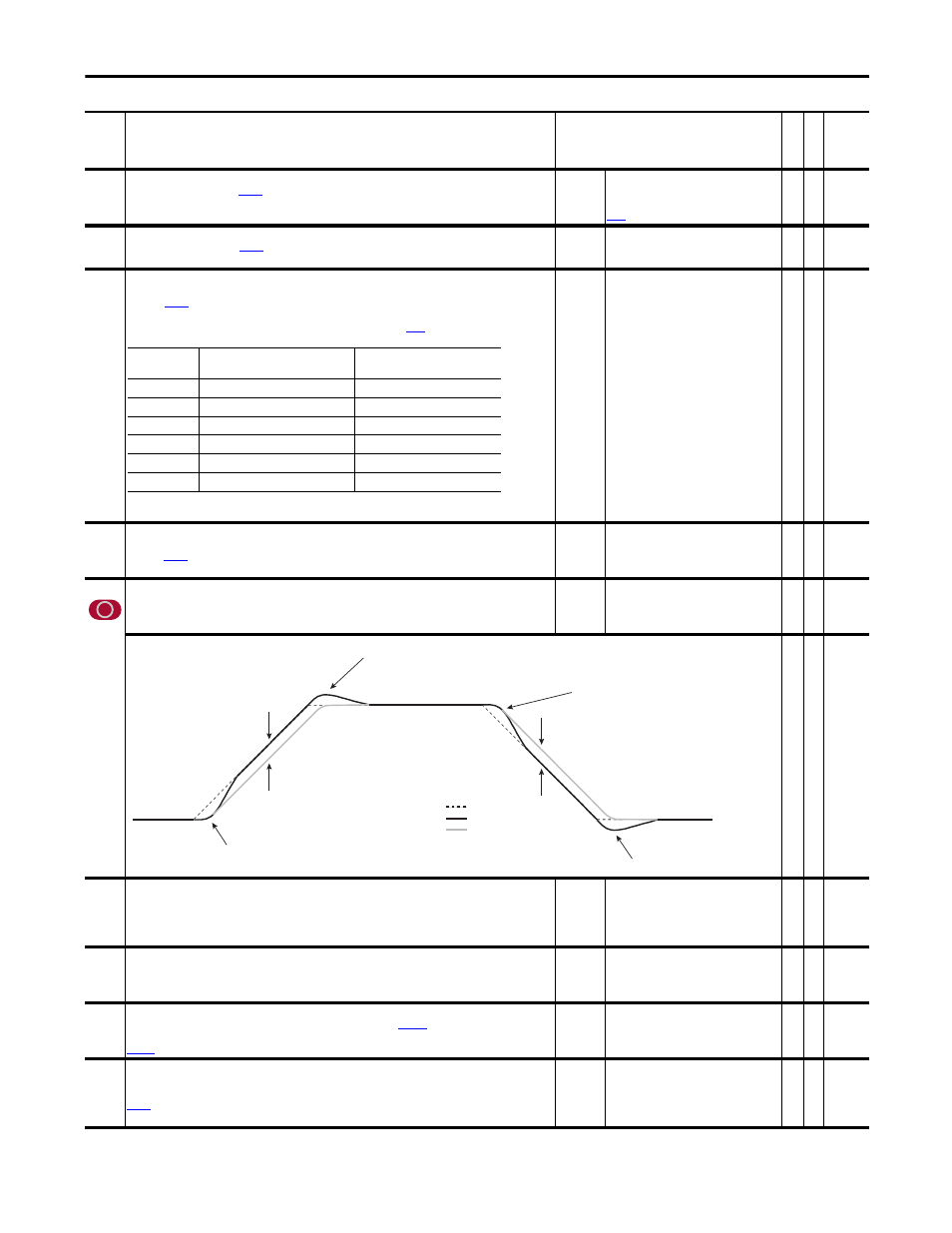
84 SpdReg
AntiBckup
By setting this parameter to 0.3, the drive will not over shoot to a step response. This parameter has no affect on
the drive's response to load changes. The recommended setting is 0.1000 to 0.5000.
Note: This parameter was changed to non-linkable for firmware version 3.001.
Default:
Min/Max:
0.0000
0.0000/0.5000
RW Real
85
Servo Lock Gain
Sets the gain of an additional integrator in the speed regulator. The effect of Servo Lock is to increase stiffness of
the speed response to a load disturbance. It behaves like a position regulator with velocity feed forward, but
without the pulse accuracy of a true position regulator. The units of Servo Lock are rad/sec. Gain should normally
be set to less than 1/3 speed regulator bandwidth, or for the desired response. Set to zero to disable Servo Lock.
Default:
Min/Max:
Units:
0.0000
0.0000/300.0000
/s
Y
RW Real
86
Spd Reg Droop
Specifies the amount of base speed that the speed reference is reduced when at full load torque. Use the droop
function to cause the motor speed to decrease with an increase in load. The units are per unit speed / per unit
torque.
Default:
Min/Max:
Units:
0.0000
0.0000/0.2500
P.U.
Y
RW Real
87
SReg Trq Preset
When the drive is not enabled, this parameter presets integrator output
[SpdReg Integ Out] to a specified
torque level. This ensures that the torque command will be at the preset value when the drive is enabled and run.
[Control Options], bit 18 [SpdRegPreset] = 0, enables this preset.
Default:
Min/Max:
Units:
0.0000
-/+8.0000 P.U.
P.U.
Y
RW 16-bit
Integer
89
Spd Err Filt BW
Sets the bandwidth of a 2nd order Butterworth low pass filter, which reduces quantization noise. The units are
rad/sec. A value of 0 will disable the filter. The value should be greater than 5 times the value of
Note: The default value for this parameter was changed from 200.0000 to 700.0000 for firmware version 2.003.
Default:
Min/Max:
Units:
700.0000
0.0000/2000.0000
rad/s
Y
RW Real
No.
Name
Description
Values
Link
able
Re
ad
-Write
Da
ta
T
yp
e
Total Inertia
(Par 9)
Maximum Speed Regulator
Bandwidth (Par 90)
Maximum Speed Regulator
Proportional Gain (Par 81)
0.01
475 (0.5 ms)
4.75
0.01
650 (0.25 ms)
6.50
0.01
30 (sensorless mode)
0.03
2.0
475 (0.5 ms)
950
2.0
650 (0.25 ms)
1300
2.0
30 (sensorless mode)
60
Under-Shoot
Over-Shoot
Over-Shoot
Under-Shoot
Error
Reference
Feedback, SpdReg AntiBckup = 0.0
Feedback, SpdReg AntiBckup = 0.3
Error