Fault/alarm descriptions – Rockwell Automation 20D PowerFlex 700S AC Drives with Phase II Control Programming Manual User Manual
Page 145
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
145
Troubleshooting
Chapter 3
Fault/Alarm Descriptions
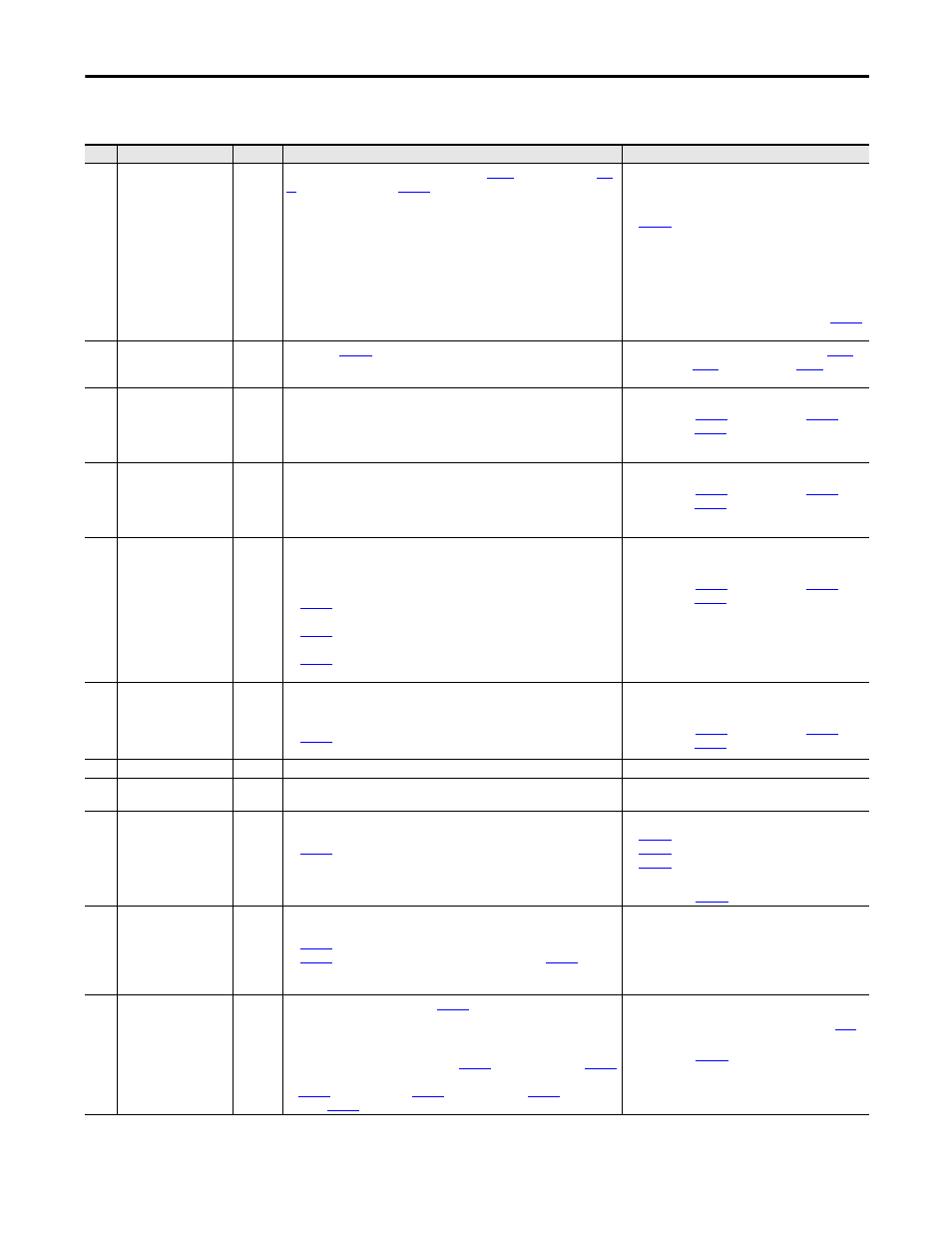
Table 6 - Fault/Alarm Descriptions, Actions and Configuration Parameters
No.
Name
Type
(1)
Description
Action
1
Abs Ovespd Det
1
The motor speed has exceeded the limits set in
[Rev Speed Limit],
[Fwd Speed Limit] and
• Check to see if the encoder feedback polarity is
correct.
• Check to see if the drive is in torque mode (selected in
[Speed/TorqueMode] value 2 “Torque Ref”).
If the drive is in torque mode, verify that there is a
load present.
• Verify the min/max settings in Par 75 [Rev Speed
Lim] and Par 76 [Fwd Speed Lim].
• Check to see if the load is overhauling. If it is
overhauling, turn the bus regulator off using
[Brake/Bus Cnfg] bit 2 “BusRef High”.
2
Vref Decel Fail
1
The value of
[Motor Spd Ref] has failed to decrease during a ramp to
zero speed stop.
This could possibly be due to a speed trim from
[Speed Trim 1],
[Speed Trim 2] or
Trim 3].
3
Encoder 0 Loss
2
One of the following has occurred on encoder 0:
• missing encoder (broken wire)
• quadrature error
• phase loss
Reconnect or replace the encoder.
Configured with
[Fdbk LsCnfg Pri],
[Fdbk
[Fdbk LsCnfgPosit].
4
Encoder 1 Loss
2
One of the following has occurred on encoder 1:
• missing encoder (broken wire)
• quadrature error
• phase loss
Reconnect or replace the encoder.
Configured with
[Fdbk LsCnfg Pri],
[Fdbk
[Fdbk LsCnfgPosit].
5
Opt Port 0 Loss
2
A fault on port 0 of the Hi-Resolution Encoder feedback option card, MDI
option card, Heidenhain option card, or Resolver feedback option card has
occurred.
•
[Stegmann0 Status] displays the fault status for port 0 of the Hi-
Resolution Encoder feedback option card.
•
[Heidenhain0 Stat] displays the fault status for port 0 of the
Heidenhain feedback option card.
•
[Resolver0 Status] displays the fault status for port 0 of the
Resolver feedback option card.
• Reconnect or replace the encoder
• Reconnect the option feedback card
Configured with
[Fdbk LsCnfg Pri],
[Fdbk
[Fdbk LsCnfgPosit].
6
Opt Port 1 Loss
2
The Linear sensor portion of the MDI feedback option card has detected a fault
condition.
•
[Linear1 Status] displays the fault status for linear portion of the
MDI feedback option card.
• Reconnect or replace the encoder.
• Reconnect the feedback option card.
Configured with
[Fdbk LsCnfg Pri],
[Fdbk
[Fdbk LsCnfgPosit].
7
Params Defaulted
1
All parameters are reset to default by user.
(Informational Only)
8
SLink HW Fail
1
A fault has occurred while loading the SynchLink firmware into FPGA on the
Main Control board at power up.
Replace the Main Control board.
9
SLink Comm Fail
2
A SynchLink communication fault has occurred.
•
[SL Error Status] displays SynchLink errors.
Verify the SynchLink configuration in:
•
[SL Node Cnfg]
•
[SL Rx CommFormat], and
•
[SL Tx CommFormat]
Reconnect SynchLink communication fibers.
Configured with
[SL CommLoss Cnfg].
10
Drive Power Loss
1
One of the following has occurred:
• DC Bus voltage has fallen below the minimum value.
•
[DC Bus Voltage] displays bus voltage.
•
[Fault TP Data] displays the minimum value when
[Fault TP
l] is set to five.
• The drive must first complete precharge before this check is made.
Verify AC line power.
11
Motor OLoad Trip
2
A motor overload trip has occurred.
[Output Current] is squared, scaled
and integrated over time. When this integrated value exceeds 1.0, this
exception event occurs.
The integrator's output can be viewed in
[Fault TP Data] when
[Fault TP l] is set to 13 “Mtr OL Outpt”. The overload integration rate is affected
by
[Motor OL Factor],
[Mtr I2T Curr Min],
[Mtr I2T Spd
Min] and
• Reduce mechanical load
• Enter correct motor nameplate full load amps
[Motor NP FLA]