Par 353, Par 356, Iq ac – Rockwell Automation 20D PowerFlex 700S AC Drives with Phase II Control Programming Manual User Manual
Page 71: Par 355
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
71
Programming and Parameters
Chapter 2
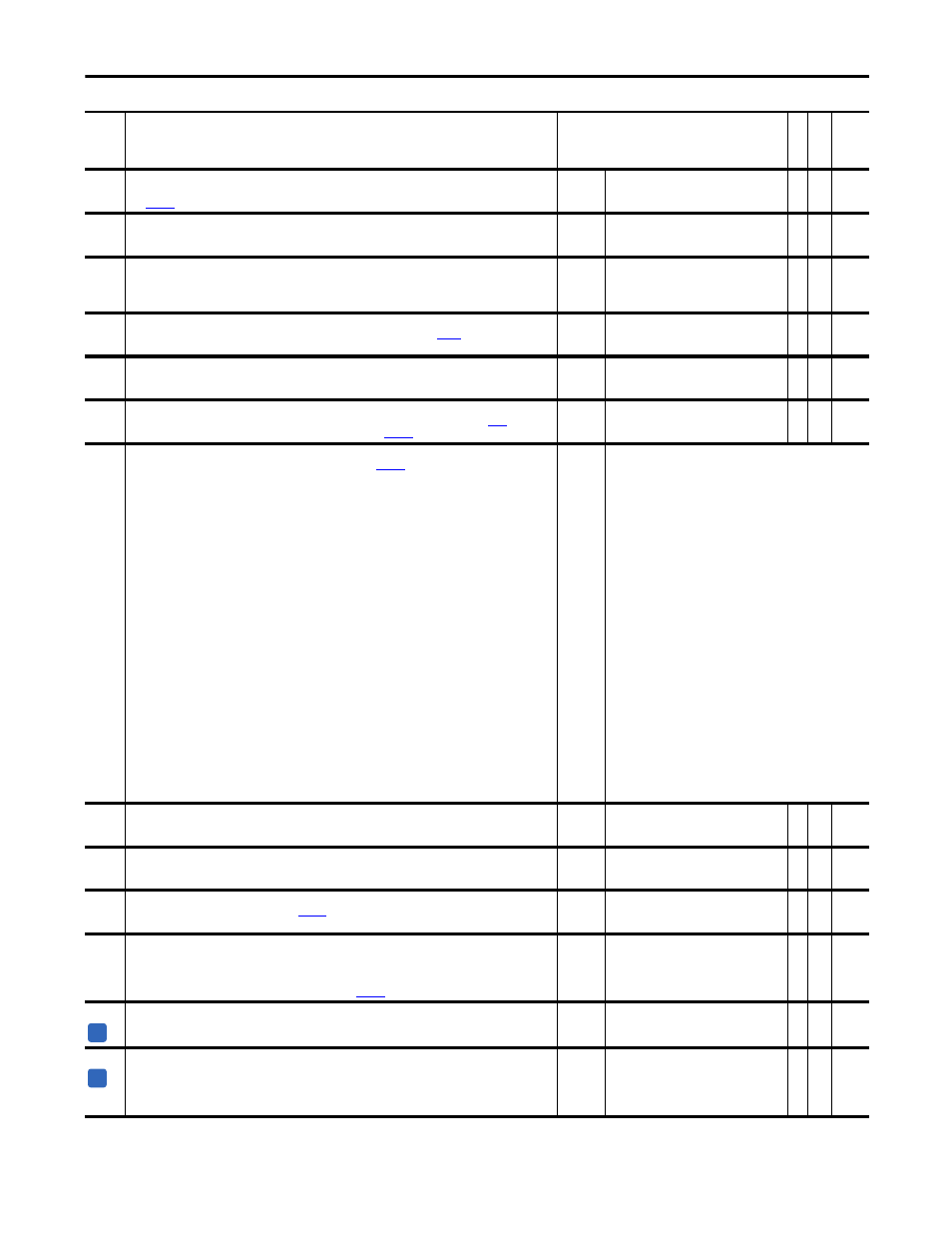
351
Iq Ref Trim
Provides an external source to command, trim or offset the internal motor current reference. This value is summed
with
[Iq Actl Ref] before the current limit is applied. Scaling is in per unit motor current.
Default:
Min/Max:
Units:
0.0000
-/+8.0000 P.U.
P.U.
Y
RW Real
352
Is Actual Lim
Displays the largest allowable stator motor current. The range of allowable motor current is limited by the
maximum drive current. Scaling is in per unit motor current.
Default:
Min/Max:
Units:
1.0000
0.0000/8.0000
P.U.
RO
Real
353
Iq Actual Lim
Displays the largest allowable torque producing (Iq) motor current. The range of allowable Iq motor current is
limited by the maximum drive current and is adjusted by the motor flux current. Scaling is in per unit Iq motor
current.
Default:
Min/Max:
Units:
1.0000
0.0000/8.0000
P.U.
RO
Real
354
Iq Rate Limit
Enter the maximum rate of change for Current Reference, in per unit current / sec.
[Spd Reg BW] will be
limited to 2/3 of this value.
Default:
Min/Max:
Units:
1000.0000
5.0000/10000.0000
/s
Y
RW Real
355
Iq Ref Limited
Displays the current reference output of the rate limiter.
Default:
Min/Max:
Units:
0.0000
-/+8.0000 P.U.
P.U.
RO
Real
356
Mtr Current Lim
Sets the largest allowable motor stator current. The online maximum value of this parameter is
[Motor NP
FLA]. The online minimum value is 105% of the current indicated in
[Flux Current].
Default:
Min/Max:
Units:
1.5000
0.0000/Calculated
P.U.
Y
RW Real
357
Curr Ref TP Sel
Enter or write a value to select current reference data displayed in
[Curr Ref TP Data].
Note: Added values 20…52 for firmware version 3.003. Added value 53 for firmware version 4.001.
Default:
Options:
0 =
0 =
1 =
2 =
3 =
4 =
5 =
6 =
7 =
8 =
9 =
10 =
11 =
12 =
13 =
14 =
15 =
16 =
17 =
18 =
19 =
20 =
21 =
22 =
23 =
24 =
25 =
26 =
“Zero”
“Zero”
27 = “Rated Vds”
“Iq Sum”
28 = “Rated Vqs”
“Iq Lim In”
29 = “RatedLamdVds”
“Iq Lim Out”
30 = “RatedLamdIds”
“Iq Rate Stat”
31 = “RatedLamd ds”
“IqLmOutNoFil”
32 = “RatedLamd qs”
“MtrCrLimStat”
33 = “Iqs”
“Lim'dMtrCrLm”
34 = “Ids”
“Iq Act Limit”
35 = “Vqs”
“Iq Cal Gain”
36 = “Vds”
“Min Lim Stat”
37 = “We”
“Iq Prescale”
38 = “Torque”
“IqtoIs Stat”
39 = “Torque Filtr”
‘Flux Status”
40 = “Lamda Ids”
“Flux LPF Out”
41 = “Lamda Iqs”
“Is Per Unit”
42 = “Lamda Vds”
“Iq Actl +Lim”
43 = “Lamda Vqs”
“Iq Actl -Lim”
44 = “Lamda ds”
“Flx Filt Hld”
45 = “Lamda qs”
“Inverse Flux”
46 = “Lamda ds Flt”
“Impedance P.U.”
47 = “Lamda qs Flt”
“ImpedanceOhm”
48 = “Torque Ref”
“Rated We”
49 = “Iq Reference”
“Leak Induct”
50 = “1/Motor Pole”
“Rated Torque”
51 = “1/Rated Iqs”
“Rated Ids”
52 = “1/Rated Torq”
“Rated Iqs”
53 = “Rs Temp Coef”
358
Curr Ref TP Data
Sets the limit value for the motor torque producing current.
Default:
Min/Max:
Units:
0.0000
-/+8.0000 P.U.
P.U.
RO
Real
359
Motor Flux Est
The Q-axis motor voltage is divided by the motor frequency while field weakening is active. This value is used to
convert the torque command to a motor current (Iqs) command.
Default:
Min/Max:
Units:
0.0000
-/+8.0000 P.U.
P.U.
RO
Real
360
Min Flux
Sets the smallest level of flux used to convert
[Motor Torque Ref] to a current reference above base speed.
Note: Changed the minimum value from “0.2500” to “0.1000” for firmware version 4.001.
Default:
Min/Max:
Units:
0.2500
0.1000/1.0000
P.U.
Y
RW Real
361
Flx LpassFilt BW
Sets the bandwidth of the low pass filter that adjusts the response of the flux estimate used in the torque to
current conversion. Since the field time constant varies between motors, a better control response may be
obtained by adjusting the filter time constant. Normally this parameter is not changed unless a significant
disturbance occurs as the motor enters field weakening AND
[Min Flux] is less than 1 per unit.
Default:
Min/Max:
Units:
12.0000
0.5000/100.0000
rad/s
Y
RW Real
362
Current Limit Gain
Sets the responsiveness of the current limit. This parameter should not be changed by the user.
Note: This parameter was added for firmware version 2.003.
Default:
Min/Max:
250
0/10000
RW 16-bit
Integer
363
Ki Current Limit
Current Limit Integral gain. This gain is applied to the current limit error signal to eliminate steady state current
limit error. A larger value increases overshoot during a step of motor current/load. This parameter should not be
changed by the user.
Note: This parameter was added for firmware version 2.003.
Default:
Min/Max:
1500
0/10000
RW 16-bit
Integer
No.
Name
Description
Values
Link
able
Re
ad
-Write
Da
ta
T
yp
e
A
A