Par 153 – Rockwell Automation 20D PowerFlex 700S AC Drives with Phase II Control Programming Manual User Manual
Page 43
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
43
Programming and Parameters
Chapter 2
153
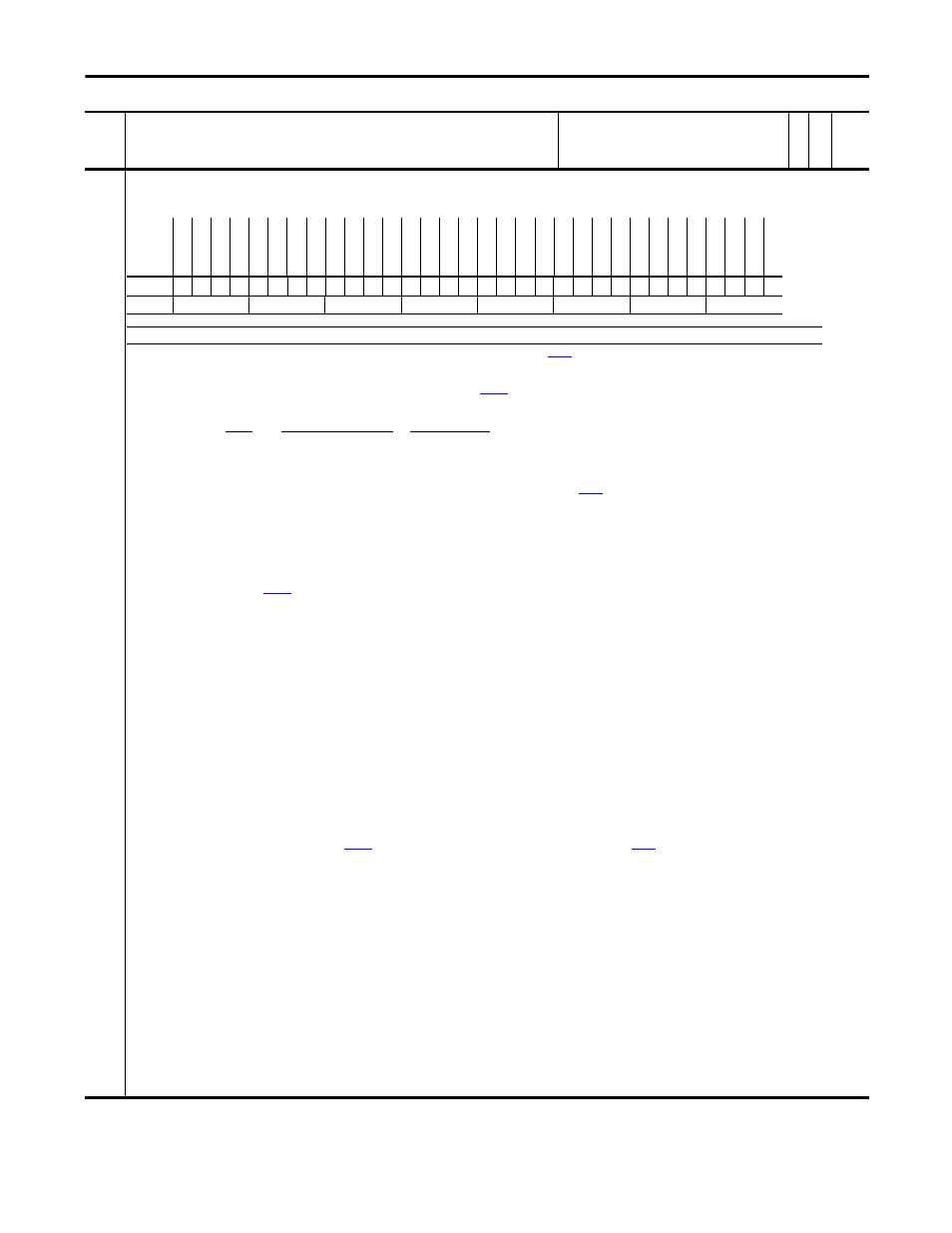
Control Options
Set bits to configure the options for operating the drive. Note: Bit 3 “Flying Start” was added for firmware version 2.004. Bit 20, 21, and 29 were added for firmware version 3.001. Added bit 31 “Ids
Test Enable” for firmware version 4.001.
No.
Name
Description
Values
Link
able
Re
ad
-Write
Da
ta
T
yp
e
Options
Id
s T
est E
nabl
e
Sy
s In
rt
E
n
Slip
Te
st
En
PM O
ff
set En
Pwr
Di
ag
E
n
Tr
q Tr
im
E
n
MC A
tune En
Ti
me
A
xi
s E
n
PIT
rim EnO
ut
Re
se
rv
ed
Inr
t T
rqLPEn
Mot
or OL
Ret
Slip
C
omp
E
n
SpdRegPr
eset
Au
x P
w
r S
ply
Au
to
T
ac
h Sw
Re
se
rv
ed
D
M
Re
se
rv
ed
D
M
OL Cl
sLpD
sbl
Jo
g -
N
oI
nt
eg
Iq D
el
ay
Mot
or Dir
Re
se
rv
ed
3W
ireC
on
tr
ol
Tr
q D
sbl
ZS
pd
Tr
q S
to
pR
am
p
Jo
g -
N
oR
amp
Jo
g i
n T
rq
Fl
ying Star
t
SErrF
ilt1S
tg
SRef
L
dL
g En
Bip
ol
ar S
Ref
Default
0
0
0
0
0
0
0
0
0
x
1
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
1
0
0
1
Bit
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
Bit
Name
Current Function
0
Bipolar SRef
When this bit is enabled a bipolar speed reference is used. In bipolar reference mode,
[Selected Spd Ref] indicates both the speed magnitude and the
direction: Positive speed reference values (+) = forward direction and negative speed reference values (–) = reverse direction. When this bit is disabled a
unipolar speed reference is used. In unipolar mode, the speed reference is limited to a minimum value of zero (0). In this case Par 40 [Selected Spd Ref]
supplies only the speed magnitude. The direction is determined by
[Applied LogicCmd] bits 20 “Forward” and 21 “Reverse”. The forward/reverse
direction button on the HIM is one possible source for the Applied Logic Command direction bits. The following chart explains the effect that the direction
button on the HIM has based on the condition of the “Bipolar SRef” bit:
Bipolar
Reference Controlled By HIM?
HIM Direction Button
Enabled
Yes
Changes the motor direction due to a HIM supplied (+) or (-) command signal.
Enabled
No
Has no effect on motor direction. Direction determined by sign of Par 40 [Selected Spd Ref].
Disabled
Yes
Changes the motor direction due to a HIM supplied Forward or Reverse Logic Command bit.
Disabled
No
Changes the motor direction due to a HIM supplied Forward or Reverse Logic Command bit.
In either Bipolar or Unipolar mode, the selected direction can be determined from the sign of
[Limited Spd Ref]. Positive values indicate forward
rotation and negative values indicate reverse rotation.
1
SRef LdLg En
Enables/disables the Speed Reference Lead Lag Filter
2
SErrFilt1Stg
Setting this bit will configure the speed error filter as a single first order low pass filter. Clearing this bit will configure the speed error filter as two cascaded
first order low pass filters
3
Flying Start
Enables/disables the function which reconnects to a spinning motor at actual rpm when a start command is issued
4
Jog in Torq
Overrides
[Speed/TorqueMode] setting when a jog command is received
5
Jog-NoRamp
Bypasses the Speed Reference Ramp and S-Curve
6
Trq StopRamp
Overrides Par 110 [Speed/TorqueMode] setting when stopping
7
Trq DsblZSpd
Configures how the drive uses stop dwell time
8
3WireControl
Configures the drive for 3-wire control
10
Motor Dir
Changes direction of the motor rotation
11
Iq Delay
Enables the Torque Current Delay option
12
Jog-NoInteg
Configures the speed regulator’s integrator to “hold” when jogging
13
OL ClsLpDsbl
Overload Closeloop Calculation Disable
14
Reserved DM
Reserved for use by the Drive module for “Invert Speed Feedback”
15
Reserved DM
Reserved for use by the Drive module for “Invert Motor Torque Current”
16
Auto Tach Sw
Switches the drive to secondary motor feedback. This bit cannot be set when Par 485 [Motor Ctrl Mode] = 2 “PMag Motor”.
17
Aux Pwr Sply
Enables the use of an auxiliary power supply. When set to 1, the Main Control Board (MCB) examines internal 12V DC power to see when it is energized. When
set to 0, the MCB examines the voltage of the DC Bus. This bit enables the MCB to remain energized when 3-Ø voltage is de-energized.
18
SpdRegPreset
When set to “1”, this bit selects
[Motor Torque Ref] for the Speed Regulator preset. When set to “0”,
[SReg Trq Preset] is selected.
19
Slip Comp
Enables slip compensation
20
Motor OL Ret
Enables motor over-load retention
21
Inrt TrqLPEn
Enables the Inertia Compensation Torque Output Low Pass Filter
23
PITrim EnOut
Enables the output of Process Trim
24
Time Axis En
Ramps the output of the Time Function Generator
25
MC Atune En
Enables Autotune tests
26
Trq Trim En
Enables Torque Trim
27
Pwr Diag En
Enables the Power Diagnostic test
28
PM Offset En
Enables the Permanent Magnet Motor offset test
29
Slip Test En
Enables the Slip Frequency Auto-Tune function
30
Sys Inrt En
Enables the System Inertia test
31
Ids Test Enable
Enables the flux producing (d-axis) current test for the Field Oriented Control (FOC) encoder mode
0 = False
1 = True