Rockwell Automation 20D PowerFlex 700S AC Drives with Phase II Control Programming Manual User Manual
Page 76
76
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Chapter 2
Programming and Parameters
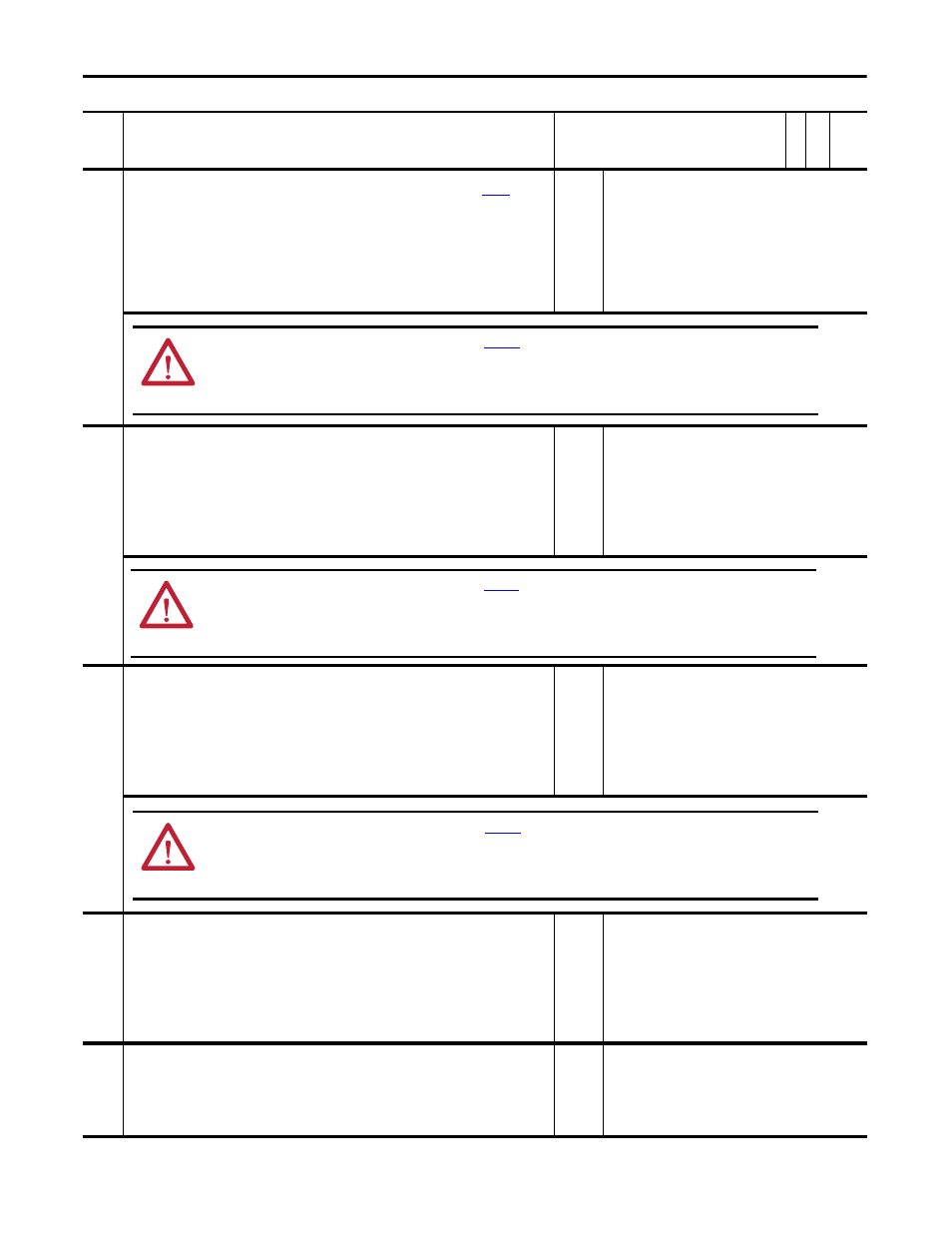
390 SL
MultErr
Cnfg
Enter a value to configure the Drive Module's response to a SynchLink Multiplier error. Refer to
[SL Mult
State] for possible causes for multiplier errors.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
response to this event.
Default
Options:
2 =
0 =
1 =
2 =
3 =
4 =
“FltCoastStop”
“Ignore”
“Alarm”
“FltCoastStop”
“Flt RampStop”
“FltCurLimStp”
391
DPI CommLoss Cfg
Enter a value to configure the drive's response to the failure of a DPI port.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
response to this event.
Default
Options:
2 =
0 =
1 =
2 =
3 =
4 =
“FltCoastStop”
“Ignore”
“Alarm”
“FltCoastStop”
“Flt RampStop”
“FltCurLimStp”
392
NetLoss DPI Cnfg
Enter a value to configure the drive's response to a communication fault from a network card at a DPI port.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
response to this event.
Default
Options:
2 =
0 =
1 =
2 =
3 =
4 =
“FltCoastStop”
“Ignore”
“Alarm”
“FltCoastStop”
“Flt RampStop”
“FltCurLimStp”
393 BusUndervoltCnfg
Enter a value to configure the drive's response to the DC Bus voltage falling below the minimum value.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
• 3 - Flt RampStop configures the drive to perform a ramp stop and set the appropriate fault bit, in response to
this event.
• 4 - FltCurLimStp configures the drive to perform a current-limit stop and set the appropriate fault bit, in
response to this event.
Default
Options:
1 =
0 =
1 =
2 =
3 =
4 =
“Alarm”
“Ignore”
“Alarm”
“FltCoastStop”
“Flt RampStop”
“FltCurLimStp”
394
VoltFdbkLossCnfg
Enter a value to configure the drive's response to a communication error between Motor Control (MC) and the
motor voltage feedback board.
• 0 - Ignore configures the drive to continue running, as normal, when this event occurs.
• 1 - Alarm configures the drive to continue running and set the appropriate alarm bit when this event occurs.
• 2 - FltCoastStop configures the drive to perform a coast stop and set the appropriate fault bit, in response to
this event.
Default:
Options:
2 =
0 =
1 =
2 =
“FltCoastStop”
“Ignore”
“Alarm”
“FltCoastStop”
No.
Name
Description
Values
Link
able
Re
ad
-Write
Da
ta
T
yp
e
ATTENTION: Risk of injury or equipment damage exists.
[SL MultErr Cnfg] lets you determine the action of the drive
if communications are disrupted. By default this parameter causes the drive fault and coast to a stop. You can set this
parameter so that the drive continues to run. Precautions should be taken to ensure that the setting of this parameter does
not create hazards of injury or equipment damage.
ATTENTION: Risk of injury or equipment damage exists.
[DPI CommLoss Cfg] lets you determine the action of the
drive if communications are disrupted. By default this parameter causes the drive fault and coast to a stop. You can set this
parameter so that the drive continues to run. Precautions should be taken to ensure that the setting of this parameter does
not create hazards of injury or equipment damage.
ATTENTION: Risk of injury or equipment damage exists.
[NetLoss DPI Cnfg] lets you determine the action of the
drive if communications are disrupted. By default this parameter causes the drive fault and coast to a stop. You can set this
parameter so that the drive continues to run. Precautions should be taken to ensure that the setting of this parameter does
not create hazards of injury or equipment damage.