Par 741, Par 744, Par 747 – Rockwell Automation 20D PowerFlex 700S AC Drives with Phase II Control Programming Manual User Manual
Page 106
106
Rockwell Automation Publication 20D-PM001C-EN-P - July 2013
Chapter 2
Programming and Parameters
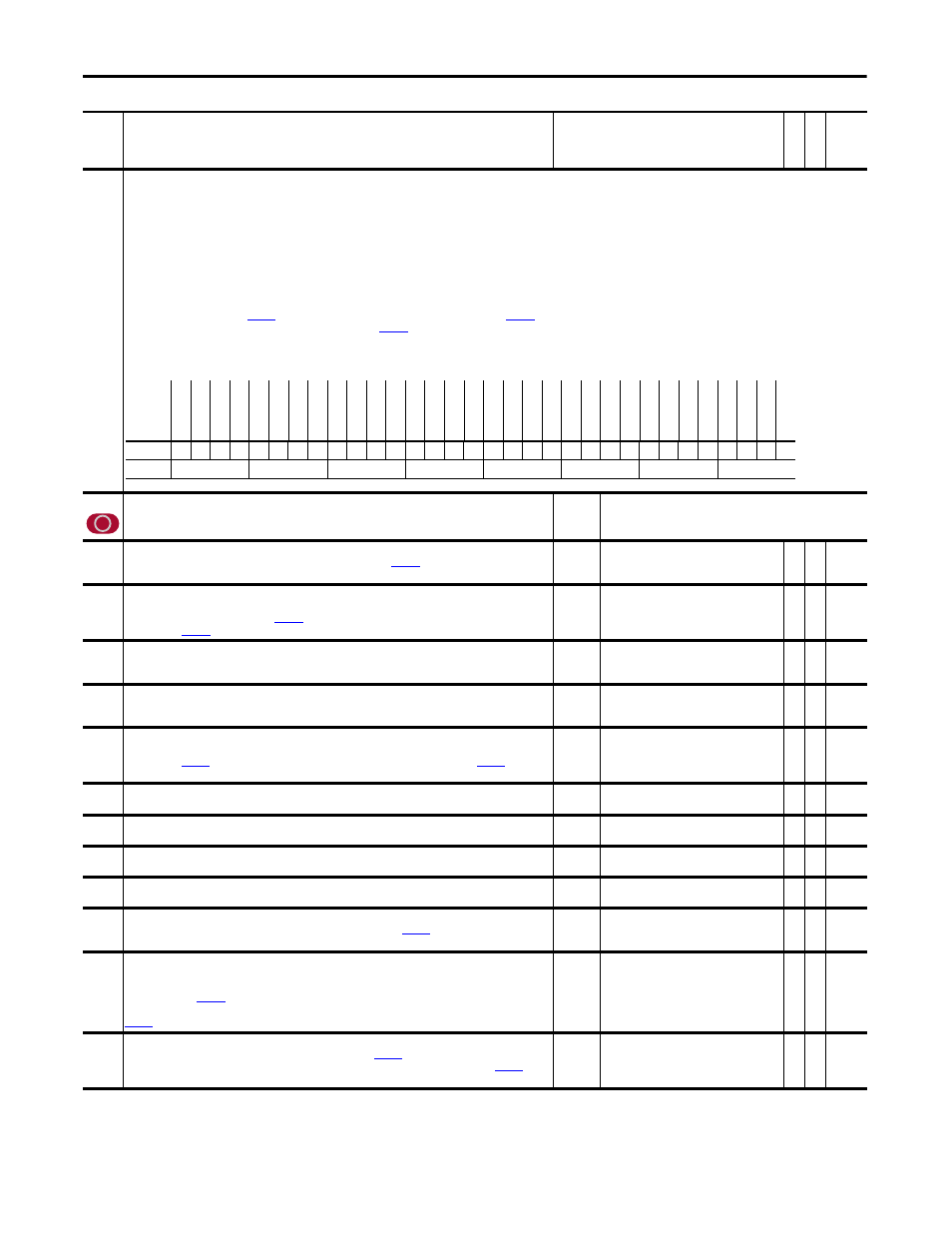
741
Position Status
Indicates status of position control algorithms.
• Bit 0 “X IGain LLim” indicates the position integrator is at the low limit.
• Bit 1 “X IGain HLim” indicates the position integrator is at the high limit.
• Bit 2 “X Spd LLim” indicates the position regulator output at the low limit.
• Bit 3 ”X Spd HLim” indicates the position regulator output is at the high limit.
• Bit 4 “PtPtRRef Act” (TBD)
• Bit 5 “XOffRRef Act” (TBD)
• Bit 7 “Regulator On” indicates position regulator is active.
• Bit 8 “Posit Watch1” indicates Position Watch 1 has detected motor position equal to its setpoint, from the proper direction.
• Bit 9 “Posit Watch2” indicates Position Watch 2 has detected motor position equal to its setpoint, from the proper direction.
• Bit 10 “In Position” indicates
[Position Error] is within the position deadband specified by
[In Posit BW].
• Bit 13 “HomeRequired” - Set when the “Find Home” bit is set in
[Position Control] and the drive is waiting on a Start command.
• Bit 14 “Homing” - Set when the drive is running the Homing Sequence.
• Bit 15 “Homed” - Set when the Homing Sequence has completed.
Note: Bits 13 - 15 were added for future use - not active for use with firmware version 3.001 and above.
742
Position Ref Sel
Enter a value to select the position mode and corresponding reference.
Note: This parameter was changed to non-linkable for firmware version 3.001.
Default:
Options:
1 =
0 =
1 =
“AuxPosit Ref”
“Interpolate”
2 = “Pt to Pt”
“AuxPosit Ref”
743
Aux Posit Ref
Supplies position reference to the position regulator when selected by
[Posit Ref Sel] = 1. This input is
designed to be linked to a position count accumulator such as a virtual encoder or hardware accumulator.
Default:
Min/Max:
0
-/+2147483648
Y
RW 32-bit
Integer
744
PositRef EGR Out
Accumulated output of the position reference Electronic Gear Ratio (EGR). When the position regulator is not
enabled, this parameter is initialized to
[Position Fdbk] or to the selected position reference as
determined by
[Position Control] bit 6.
Default:
Min/Max:
0
-/+2147483648
RO 32-bit
Integer
745
PositRef EGR Mul
An integer value in the numerator of the EGR function that is precision multiplied by the selected position
reference. A negative value will effect a change in polarity.
Default:
Min/Max:
1
-/+2000000
Y
RW 32-bit
Integer
746
PositRef EGR Div
An integer value in the denominator of the EGR function that divides into the product of the numerator and the
selected position reference. Remainders are accumulated and not lost.
Default:
Min/Max:
1
1/2000000
Y
RW 32-bit
Integer
747
Position Cmmd
Final accumulated command to the position regulator. When the position regulator is not enabled, this parameter
is initialized to
[Position Fdbk] or to the selected position reference as determined by
[Position
Control] bit 6. Thereafter, its value will reflect the result of reference and offset changes.
Default:
Min/Max:
0
-/+2147483648
RO 32-bit
Integer
748
CoarsePosit Trgt
Input to the interpolator. This is a coarse position target reference.
Default:
Min/Max:
0
-/+2147483648
Y
RW 32-bit
Integer
749
Interp Position
Input to the interpolator. This is a fine position target reference.
Default:
Min/Max:
0
-/+2147483648
RO 32-bit
Integer
750
Coarse Spd Trgt
Input to the interpolator. This is a coarse speed target reference.
Default:
Min/Max:
0
-/+2200000000.0000
Y
RW Real
751
Interp Speed
Output from the interpolator. This is a fine speed target reference.
Default:
Min/Max:
0
-/+8.0000 P.U.
RO Real
752
Interp AccelRate
Output from interpolator. This is a fine acceleration rate. First derivative of
[Course Spd Trgt] if available, or
zero (0) if not available.
Default:
Min/Max:
0
-/+8.0000 P.U.
RO Real
753
Posit Offset 1
Supplies a position reference offset, which is summed after the EGR and used to phase trim position reference. A
step in the offset position will be internally rate limited and added to the selected reference position. The rate of
correction is set by
[Posit Offset Spd]. The initial value of this parameter is latched upon position enable
without causing a change in reference. Subsequent changes to this value will be relative to the latched value. See
[Position Control], bit 5 for re-referencing the offsets.
Default:
Min/Max:
0
-/+2147483648
Y
RW 32-bit
Integer
754
Posit Offset 2
Supplies another position reference offset, which is summed with
[Posit Offset 1]. Used to trim the phase
of the selected position reference. Position offset will be internally rate limited to a velocity set by
[Posit
Offset Spd].
Default:
Min/Max:
0
-/+2147483648
Y
RW 32-bit
Integer
No.
Name
Description
Values
Link
able
Re
ad
-Write
Da
ta
T
yp
e
Options
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Hom
ed
Hom
in
g
Hom
eRe
qui
red
Re
se
rv
ed
Posit Out En
In P
os
iti
on
Po
si
t W
at
ch
2
Po
si
t W
at
ch
1
Re
gulator O
n
Re
se
rv
ed
XO
ff
RR
ef
A
ct
Pt
Pt
RR
ef
A
ct
X Sp
d HLim
X Sp
d LLim
X IG
ai
n H
Lim
X I
Gai
n LLi
m
Default
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
0
0
0
x
0
0
0
1
0
x
0
0
0
0
1
0
Bit
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
0 = False
1 = True