Ramp – Rockwell Automation 20G PowerFlex 750-Series AC Drives User Manual
Page 99
Rockwell Automation Publication 750-RM002B-EN-P - September 2013
99
Drive Configuration
Chapter 1
Ramp
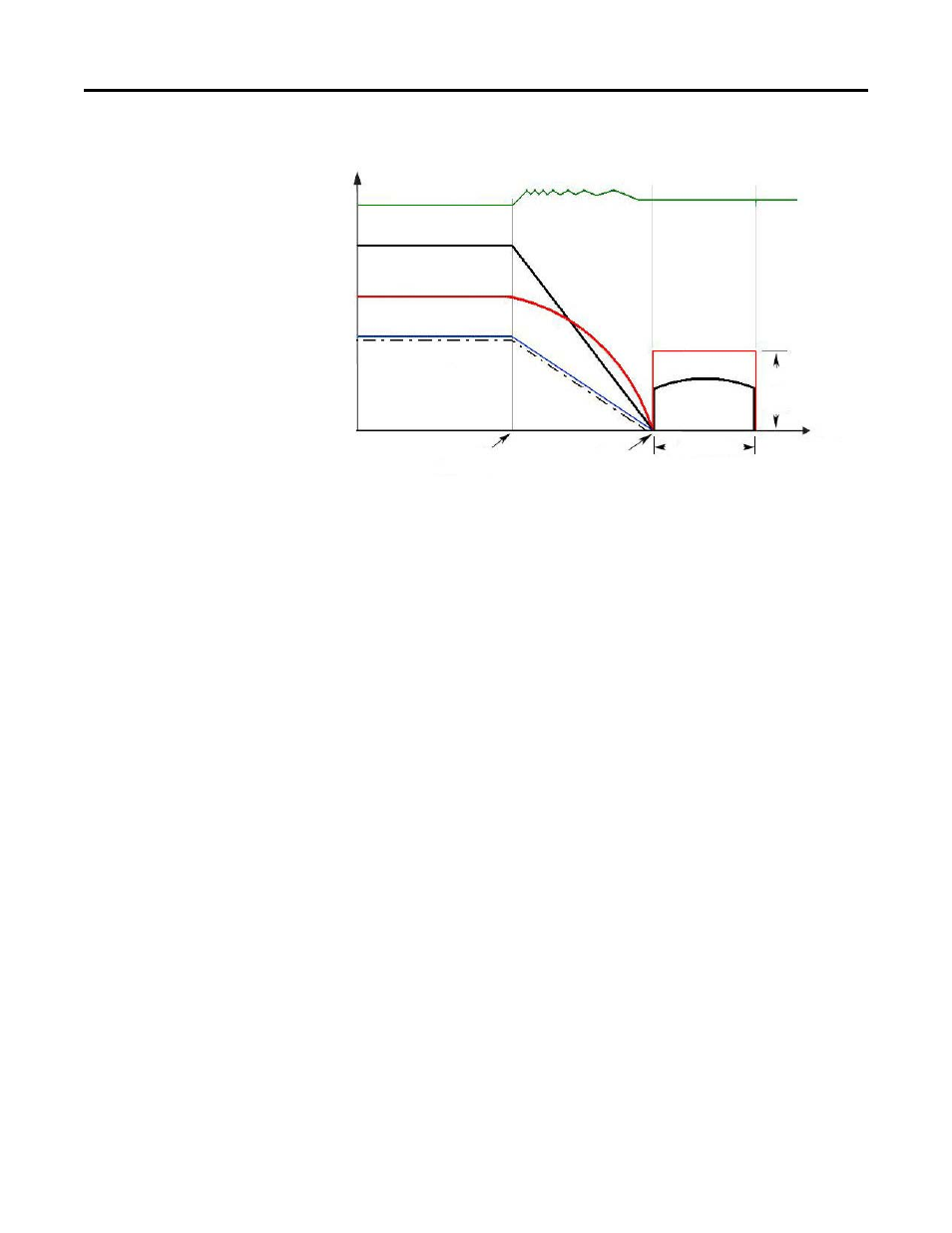
This method uses drive output reduction to stop the load.
Ramp To Stop is selected by setting parameters 370/371[Stop Mode A/B] to 1
“Ramp.” The drive ramps the frequency to zero based on the deceleration time
programmed into parameters 537/538 [Decel Time 1/2]. The normal mode of
machine operation can utilize [Decel Time 1]. If the machine Stop requires a
faster deceleration than desired for normal deceleration, [Decel Time 2] can be
activated with a faster rate selected. When in Ramp mode, the drive
acknowledges the Stop command by decreasing or ramping the output voltage
and frequency to zero in a programmed period (Decel Time), maintaining
control of the motor until the drive output reaches zero. The drive output is then
shut off. The load/motor follows the decel ramp. Other factors such as bus
regulation and current limit can alter the actual decel rate.
Ramp mode can also include a timed hold brake. Once the drive has reached zero
output hertz on a Ramp-to-Stop and both parameters 395 [DC Brake Time] and
P394 [DC Brake Level] are not zero, the drive applies DC to the motor
producing current at the DC Brake Level for the DC Brake Time:
•
On Stop, drive output decreases according to the programmed pattern
from its present value to zero. The pattern can be linear or squared. The
output decreases to zero at the rate determined by the programmed P520
[Max Fwd Speed] or P521 [Max Rev Speed] and the programmed active
(Decel Time
n).
•
The reduction in output can be limited by other drive factors such as bus
or current regulation.
•
When the output reaches zero the output is shut off.
•
The motor, if rotating, coasts from its present speed for a time that is
dependent on the mechanics of the system (inertia, friction, and so forth).
Bus Voltage
Output Voltage
Output Current
Motor Speed
Command Speed
Time
DC Hold Time
Stop Command
Zero Command Speed
Output Voltage
Output Current
DC
Hold
Level