Rockwell Automation 20G PowerFlex 750-Series AC Drives User Manual
Page 272
272
Rockwell Automation Publication 750-RM002B-EN-P - September 2013
Chapter 4
Motor Control
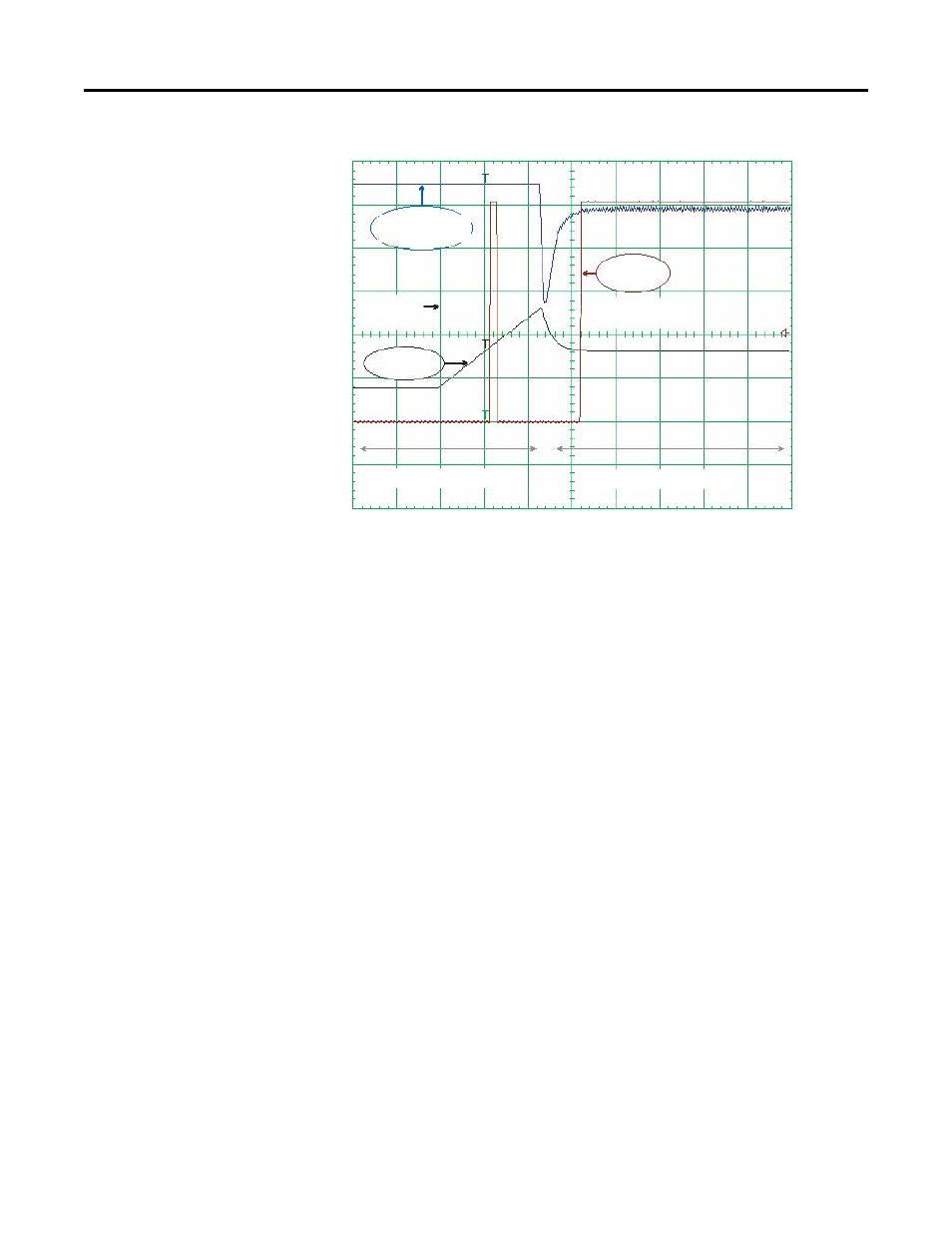
Figure 33 - Minimum Torque Speed without SLAT
Or
•
The speed error becomes negative (the speed feedback becomes greater
than the speed reference). This would force the control into speed
regulator mode, a condition called Forced Speed Mode FSM.
By forcing the drive to enter speed mode FSM, the transition occurs earlier than
it would have if the reaction was triggered at the very point that the torque
reference value in speed mode is mathematically less than the value in torque
mode, generally resulting in less velocity overshoot.
P314 [SLAT Err Stpt] and P315 [SLAT Dwell Time] allow setting some
hysteresis for turning off the forced speed mode. They are set to 0 as default so
that there is no hysteresis. In SLAT minimum mode, [SLAT Err Stpt] sets how
much less the speed feedback should be than the speed reference before turning
off the forced speed mode. The SLAT dwell time sets how long the speed error
must exceed the SLAT error set point before turning off the forced speed mode.
At the time that the drive switches from torque mode to forced speed mode, the
speed regulator output is loaded with the internal motor torque reference to
create a smooth transition. In order for the drive to switch from speed mode back
to torque mode, forced speed mode (if active) must first be turned off. Forced
speed mode will turn off when the speed error is greater than the SLAT error set
point for the SLAT dwell time.
With default parameter settings, this will occur when the speed error becomes
positive.
When forced speed mode is off, the drive will switch back to Torque mode when
the speed regulator output becomes greater than the torque reference.
Internal Torque
Command
Load Step
(Decreased)
Speed
Feedback
At Speed
Relay
Torque Regulator
Speed Regulator