Pid status, Pid reference and feedback, Pid reference and feedback scaling – Rockwell Automation 20G PowerFlex 750-Series AC Drives User Manual
Page 85
Rockwell Automation Publication 750-RM002B-EN-P - September 2013
85
Drive Configuration
Chapter 1
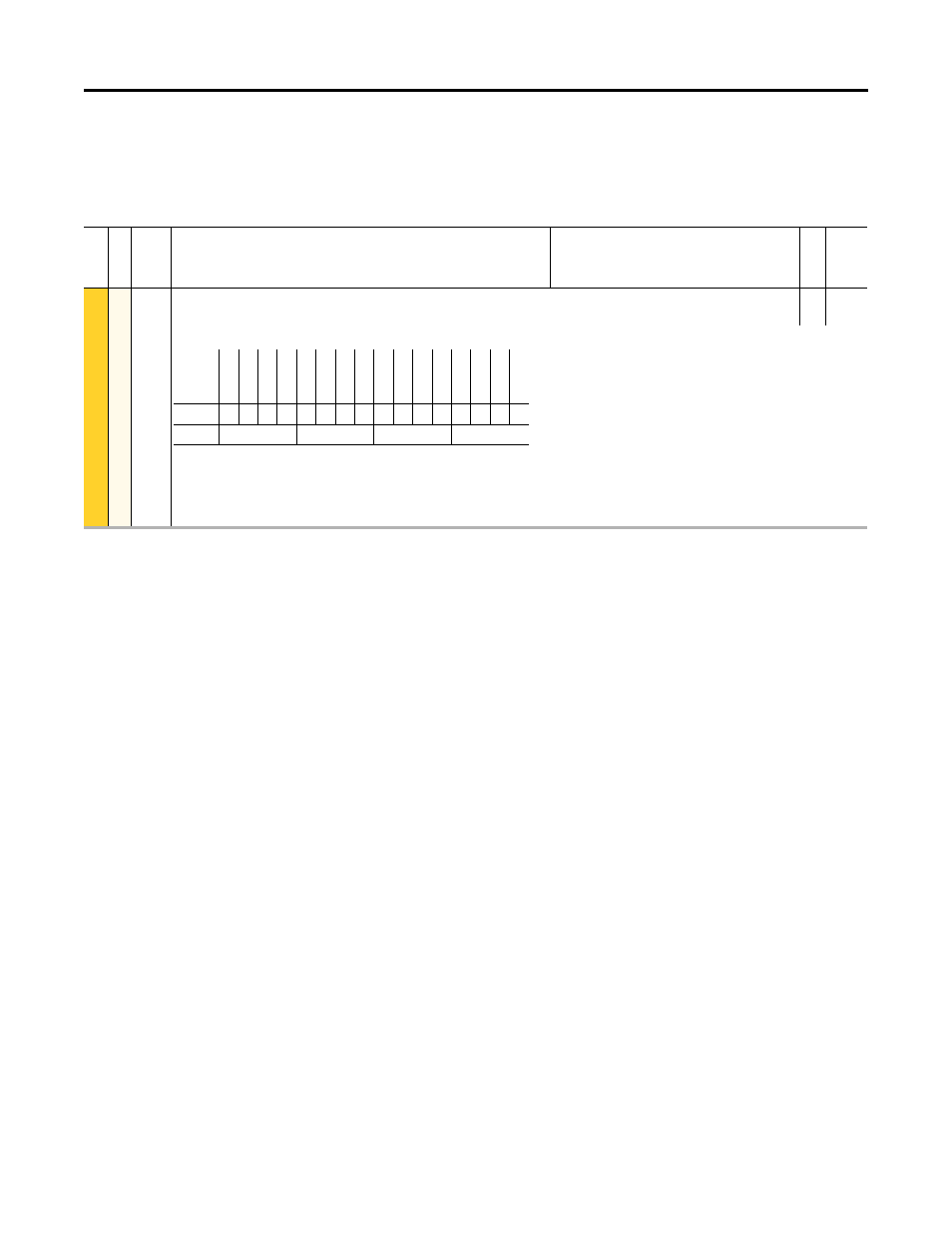
PID Status
P1089 [PID Status] parameter is a set of bits that indicate the status of the
process PID controller.
PID Reference and Feedback
The selection of the source for the reference signal is entered in P1067 [PID Ref
Sel]. The selection of the source for the feedback signal is selected in P1072 [PID
Fdbk Sel]. The reference and feedback have the same limit of possible options.
Options include DPI adapter ports, MOP, preset speeds, analog inputs, pulse
input, encoder input and PID setpoint parameter.
The value used for reference is displayed in P1090 [PID Ref Meter] as a read only
parameter. The value used for feedback is displayed in P1091 [PID Fdbk Meter]
as a read only parameter. These displays are active independent of PID Enabled.
Full scale is displayed as ±100.00%.
PID Reference and Feedback Scaling
The analog PID reference can be limited by using P1068 [PID Ref AnlgHi] and
P1069 [PID Ref AnlgLo]. [PID Ref AnlgHi] determines the high value, in
percent, for the analog PID reference. [PID Ref AnlgLo] determines the low
value, in percent, for the PID reference.
The analog PID feedback can be limited by using P1068 [PID Ref AnlgHi] and
P1069 [PID Ref AnlgLo]. [PID Ref AnlgHi] determines the high value, in
percent, for the PID feedback. [PID Ref AnlgLo] determines the low value, in
percent, for the PID feedback.
Fil
e
Gr
oup
No.
Display Name
Full Name
Description
Values
Re
ad
-Write
Da
ta
T
yp
e
APPLIC
AT
IONS
P
ro
ce
ss PID
1089
PID Status
PID Status
RO
16-bit
Integer
Status of the Process PI regulator.
Bit 0 “PID Enable” – PID controller is enabled.
Bit 1 “PID Hold” – Hold PID integrator.
Bit 2 “PID Reset” – Reset PID integrator.
Bit 3 “PID In Limit” – PID in limit.
Options
Res
er
ve
d
Res
er
ve
d
Res
er
ve
d
Res
er
ve
d
Res
er
ve
d
Res
er
ve
d
Res
er
ve
d
Res
er
ve
d
Res
er
ve
d
Res
er
ve
d
Res
er
ve
d
Res
er
ve
d
PI
D In Lim
it
PI
D Reset
PI
D Hol
d
PI
D Enabled
Default
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Bit
15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
0 = Condition False
1 = Condition True