Torque control - torque, Torque control – t orque – Rockwell Automation 20G PowerFlex 750-Series AC Drives User Manual
Page 400
400
Rockwell Automation Publication 750-RM002B-EN-P - September 2013
Chapter 6
Integrated Motion on the EtherNet/IP Network Applications for PowerFlex 755 AC Drives
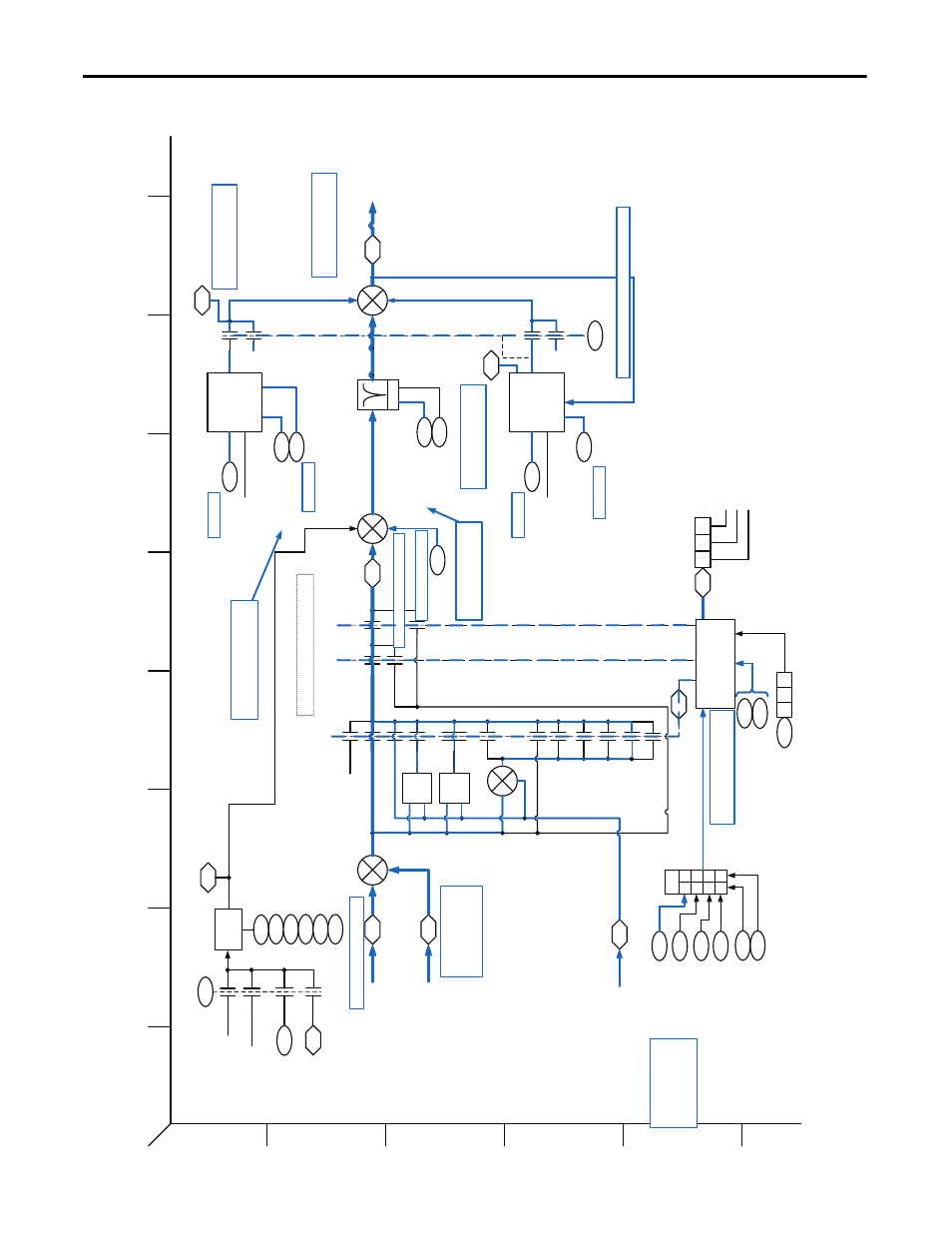
Torque Control - Torque
1
2
3
4
5
6
B
A
D
C
F
E
H
G
I
Torque Control –
T
orque
660
699
Min
Max
SReg Output
Inertia Comp Out
0
686
Torque
Step
688
No
tc
h Fltr
Atte
n
685
Sel
e
cted
Trq Ref
Notc
h
II
R
687
No
tch Fltr
Fre
q
+
+
Inertia
Adaption
76
Total Inertia
705
706
Inert
ia Adapt BW
InertiaAdaptGain
+
+
+
+
-
+
Filtered Trq
Re
f
4
Co
mma
nde
d Tr
q
689
Select
Logi
c
313
Ac
tv
SpTqPs
Mode
935
21
22
23
Drive Status 1
T
orque M
ode
Positi
onMode
Spee
d Mode
Sp
dTrq
Psn Mode
A
708
InertiaTrqAdd
Motor Acceleration
Feed
back
0
0
1
Load
Observer/
Estimator
76
Total Inertia
71
1
Lo
ad Observer
BW
Motor Acceleration
Feed
back
0
0
2
+
Load
Es
tim
a
te
707
70
4
InAdp LdObs Mode
Disable
d
Disa
bled
In
ertia
Ada
ption
Load
Ob
server
Sp
dTrq
Psn Mode
B
SpdTrqPs
n Mode
C
SpdTrqPs
n Mode
D
18
1
18
2
DI SpTqPs
Sel 0
DI SpTqPs Sel
1
31
4
SLAT Err Stpt
31
5
SLAT Dwell
Tim
e
Zero Torque
0
1
2
3
4
5
6
7
8
9
10
Speed
Reg
Tor
q Reg
SL
AT
Mi
n
SLAT
Max
Sum
Pro
filer
Psn P2P
P
sn Cam
ming
Psn PLL
Psn D
irect
30
9
31
0
31
1
31
2
0
1
1
1
1
0
0
0
ABCD
Select
From Spd Ref
[7C4]
[10D5]
Fr
om Sp
d Reg
[10I3]
From Torq Ref
[22H4]
[6A1],
[6D2],
[10D5],
[11D2],
[11I1],
[12H5],
[1
6H
2]
To Torq Ctrl
Curr
ent
[24a
B2
],
[24b B2],
[25D2],
[26D2]
[25B
4]
[26C5]
0
1
Logic Ctrl State
(Forced Spd)
0
Min/Max Cntrl
(Fo
rced Spd)
1
***INTERNAL CONDITION
ONLY***
Mtr Option Cnfg
(Ze
ro Trq
Stop)
(Tr
q Mode
Stop)
(T
rq Mod
eJog)
0
1
2
40
+
FrctnComp Trig
1561
156
7
Frct
nComp
Out
Friction
Comp
Frct
nC
omp Mode
Int R
amp R
ef
1560
700
0
D
isabled
0
1
2
Ext Ramped Ref
From
Spd Ref
[7
A
3
]
FrctnComp Hyst
1562
FrctnCo
m
p Time
1563
FrctnCo
m
p Stick
1564
FrctnCo
m
p Slip
1565
FrctnCo
m
p Rated
1566
640
3
Filtered SpdFdbk
PF
755 Rev
_9.a
Pag
e 23
45
7 Velocity
L
oop
Ou
tp
ut
40 –
Control Mode
833 –
S
LAT
Configuration
834 –
S
LAT Setpoint
835 –
S
LAT Delay Time
492 –
T
orque Reference
491 –
T
orque Trim
503
–
T
orq
ue No
tch
Filter Freq
496
-
K
j
496
-
K
j
806 -
K
op
802 –
L
oad Observer
Torque Esti
m
ate
809 -
K
of
1435 –
F
eedback n Accel
Filter Bandwidth
805 –
L
oad Observer Configuration
493
–
T
orque
Reference Filtered
801 –
L
oad Observer
Acceleration Estimate
452 –
A
cceleration
Feedforward
Command
11
Ps
n SpdlO
rnt