Rockwell Automation 20G PowerFlex 750-Series AC Drives User Manual
Page 275
Rockwell Automation Publication 750-RM002B-EN-P - September 2013
275
Motor Control
Chapter 4
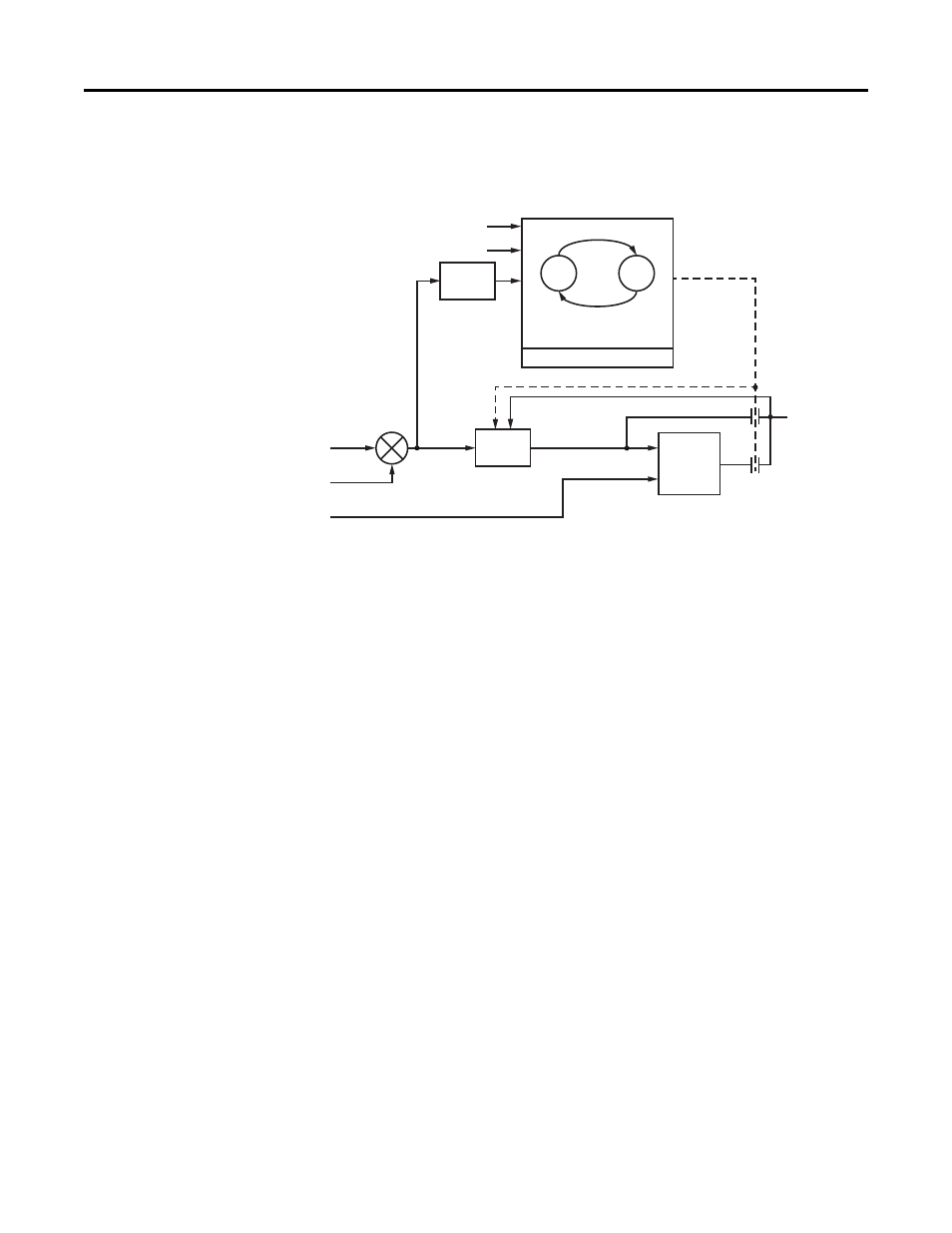
With default parameter settings, this will occur when the speed error becomes
negative. When forced speed mode is off, the drive will switch back to torque
mode when the speed regulator output becomes less than the torque reference.
Sum
Configuring the drive in this mode enables an external torque input to be
summed with the torque command generated by the speed regulator. This mode
requires both a speed reference and a torque reference to be linked. This mode
can be used for applications that have precise speed changes with critical time
constraints. If the torque requirement and timing is known for a given speed
change, then the external torque input can be used to preload the integrator. The
timing of the speed change and the application of an external torque command
change must be coordinated for this mode to be useful. The “Sum Spd/Trq”
mode will then work as a feed forward to the torque regulator.
+
–
P314 [SLAT Err Stpt]
P315 [SLAT Dwell Time]
Low Pass
Filter
Speed Error > 0
Off
On
Speed Error < SLAT Setpoint
for SLAT Time
FSM State Controller
Application Dependant
Speed Reference Bias
Motor Speed Feedback
External Torque
Reference (ETR)
Speed Error
Speed Regulator
Output (SRO)
Forced Speed
Mode (FSM)
FSM - On
Off
PI
Regulator
M
ax
Select
Internal Torque
Reference (ITR)