Slat min mode – Rockwell Automation 20P PowerFlex Digital DC Drive User Manual
Page 296
296
Rockwell Automation Publication 20P-UM001I-EN-P - February 2013
Appendix C
Application Notes
SLAT Min Mode
In SLAT Min mode, you would typically configure a speed reference that forces
the speed regulator into saturation (the speed reference is slightly above the speed
feedback). In this case the drive would follow the torque reference until there was
a breakage or slippage in the application.
When the drive is following a torque reference (torque mode) in SLAT Min
mode, either one of two conditions will force the drive into following the speed
reference (speed mode):
1.
The output of the speed regulator becomes less than the torque reference.
2.
The speed error becomes negative (the speed feedback becomes greater
than the speed reference). This is forced speed mode.
Parameter 15 [SLAT Err Stpt] and parameter 16 [SLAT Dwell Time] allow you
to set some hysteresis for turning off the forced speed mode. They are set to “0” as
default so that there is no hysteresis. In SLAT Min mode, Par 15 [SLAT Err Stpt]
sets how much less the speed feedback should be than the speed reference before
turning off the forced speed mode. Par 16 [SLAT Dwell Time] sets how long the
speed error must exceed the SLAT error set point before turning off the forced
speed mode.
At the time the drive switches from torque mode to forced speed mode, the speed
regulator integral part is pre-loaded with the InternalTorque Reference (ITR) or
Par 14 [Selected TorqRef ] to create a smooth transition.
In order for the drive to switch from speed mode to torque mode, forced speed
mode (if active) must first be turned off. Forced speed mode will turn off when
the speed error is greater than the SLAT error setpoint for the SLAT dwell time.
With default parameter settings, this will occur when the speed error becomes
positive.
When Forced Speed Mode is off, the drive will switch back to torque mode when
the speed regulator output becomes greater than the torque reference.
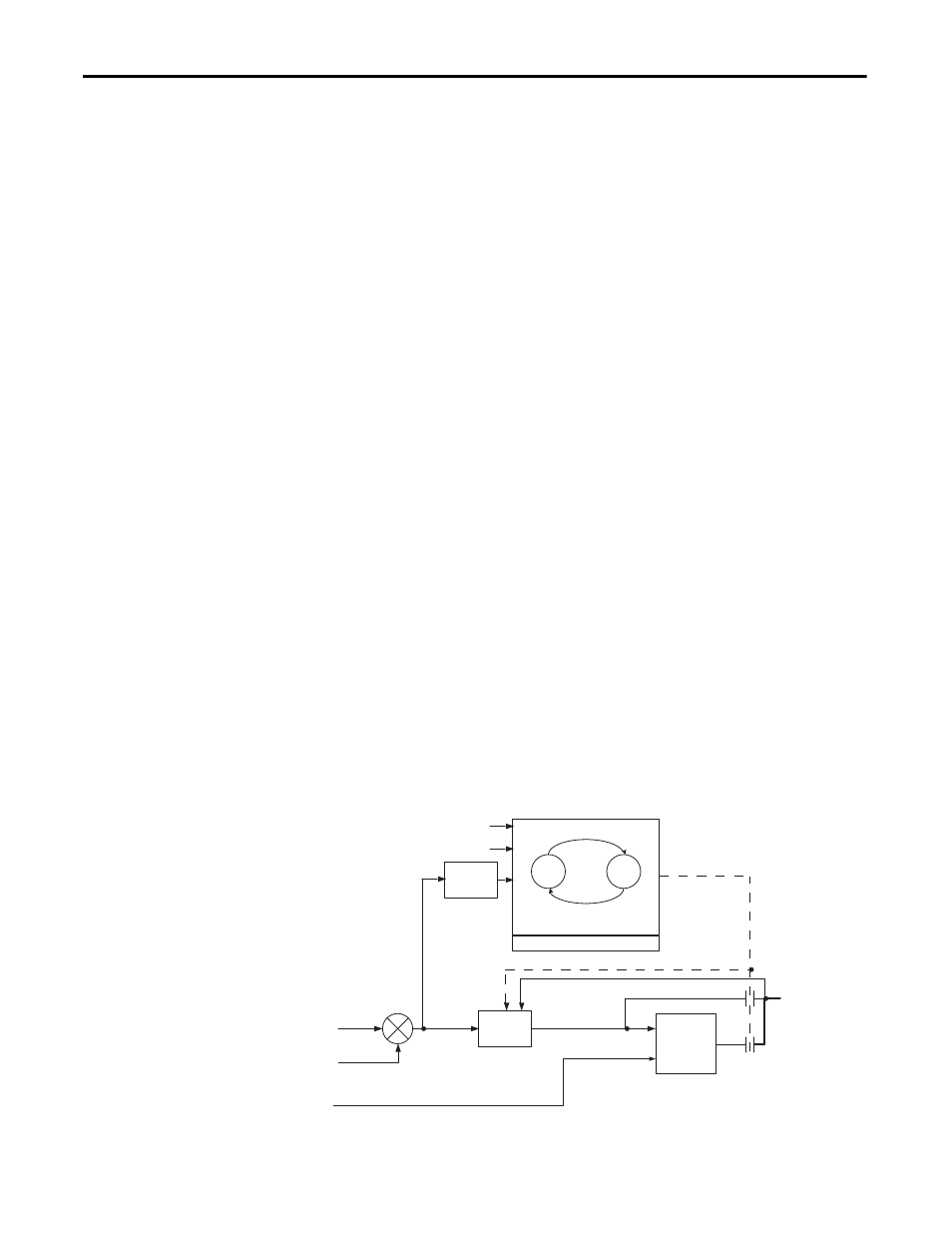
Application
Dependant Speed
Reference Bias
Motor Speed
Feedback
+
-
Speed Error
PI
Regulator
Speed Regulator
Output (SRO)
Min
Select
External Torque
Reference (ETR)
Internal Torque
Reference (ITR)
Off
Forced Speed
Mode (FSM )
FSM =
On
Low Pass
Filter
On
Off
Speed Error < 0
Speed Error > SLAT Setpoint
for SLAT Dwell Time
FSM State Controller
Par 15 [SLAT Err Stpt]
Par 16 [SLAT Dwell Time]