Rockwell Automation 20P PowerFlex Digital DC Drive User Manual
Page 124
124
Rockwell Automation Publication 20P-UM001I-EN-P - February 2013
Chapter 3
Programming and Parameters
MO
TOR C
ONTROL
M
ot
or Da
ta
201
[Drive Type Sel]
Important:
This parameter is only applicable to non-regenerative (2-
quadrant) drives.
Allows non-regenerative drives to use an external 4-quadrant controller.
• “On” = Ramp, Speed, Torque current references and Speed measurement
have the same behavior as a four quadrant drive.
Default:
Options:
0 =
0 =
1 =
“Off”
“Off”
“On”
16-bit
Int
280
[Nom Mtr Fld Amps]
Rated motor nameplate field current (I
dFN
). Leave set to the default value for
permanent magnet motor applications.
Default:
Min/Max:
Units:
Par 374 [Drv Fld Brdg Cur] x 0.33
0.00 / [Drv Fld Brdg Cur]
A
Real
374
[Drv Fld Brdg Cur]
Drive rated field bridge current (I
dFN
). The value in this parameter must be set
equal to the value chosen with DIP switch S14 on the control board (see
on page
for DIP switch configuration). Leave set to the default
value for permanent magnet motor applications.
Default:
Min/Max:
Units:
1.00
0.50 / 80.00
A
Real
376
[MtrOvrld Type]
Allows selection of the type of motor overload calculation based on Par 179
[Motor Arm Amps].
• StandardDuty = 150% load for 1 minute or 200% load for 3 seconds
before a motor overload condition is indicated.
• HeavyDuty = 200% load for 1 minute before a motor overload condition
is indicated (250% for 30 sec). This selection requires that the drive be
oversized relative to the motor in order to be able to provide the necessary
current without faulting from a “Drive Overload” (F.64).
Note: This parameter was added for firmware version 3.001.
Default:
Options:
0 =
0 =
1 =
“StandardDuty”
“StandardDuty”
“HeavyDuty”
16-bit
Int
179,
479,
1290
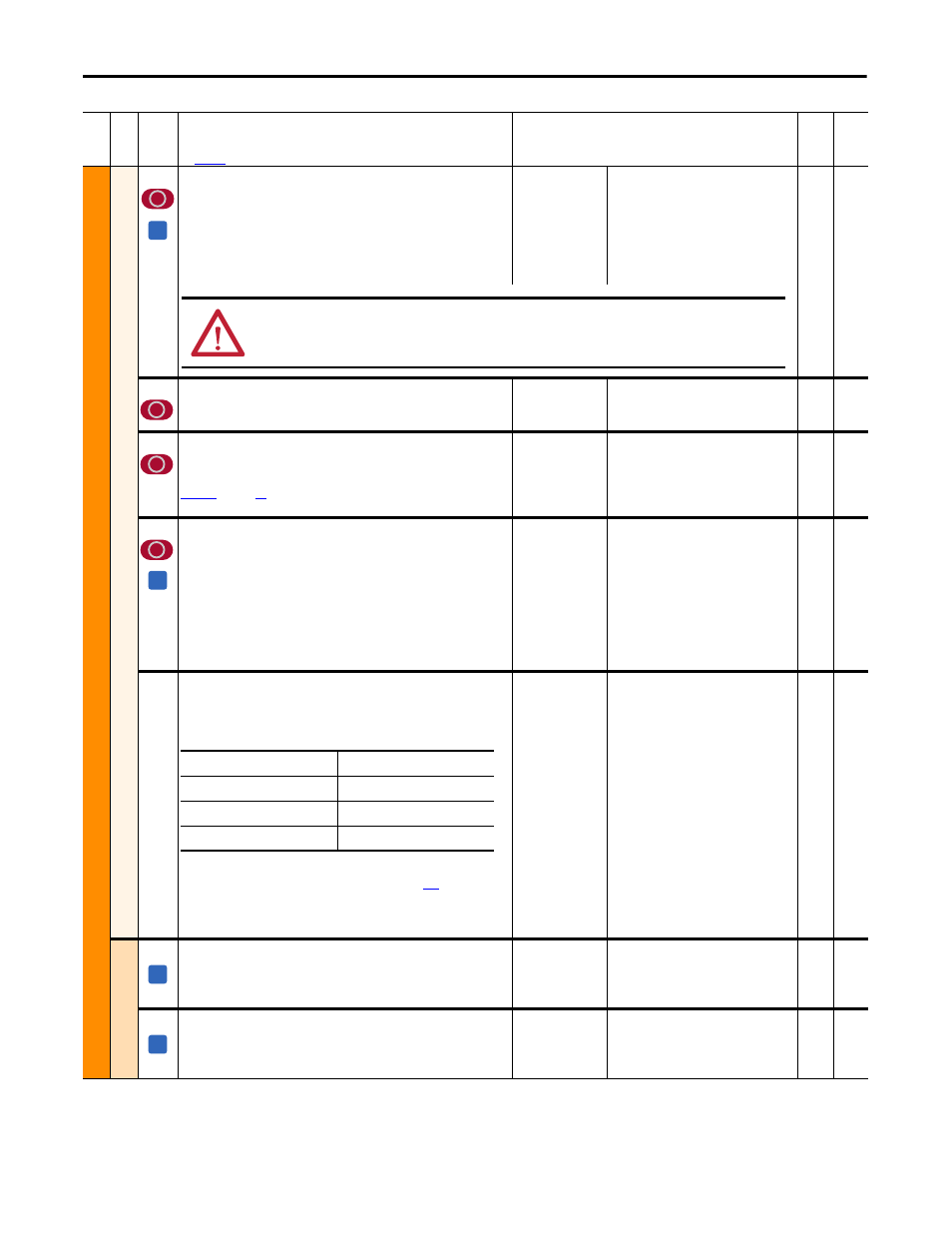
464
[SAR Volts Scale]
Scales the following parameters so that they show actual voltage values
rather than drive calculated values when in Standalone Regulator (SAR)
mode:
Notes: This parameter was added for firmware version 4.001. See Appendix H
PowerFlex DC Standalone Regulator Installation on page
for more
information.
Important: When the drive is not in SAR mode, this parameter is clamped to
the default value (1.0).
Default:
Min/Max:
1.0
0.5 / 10.0
Real
Fie
ld Co
nf
ig
91
[Fld Reg Kp]
Proportional gain (K
P
) of the flux regulator expressed as a percentage of Par
97 [Fld Reg Kp Base]. Leave set to the default value for permanent magnet
motor applications.
Default:
Min/Max:
Units:
2.00
0.00 / 100.00
%
Real
97
92
[Fld Reg Ki]
Integral gain (K
I
) of the flux regulator expressed as a percentage of Par 98 [Fld
Reg Ki Base]. Leave set to the default value for permanent magnet motor
applications.
Default:
Min/Max:
Units:
1.00
0.00 / 100.00
%
Real
98
Fil
e
Gr
oup
No
.
Parameter Name & Description
See
page 110
for symbol descriptions
Values
Da
ta
T
yp
e
Rela
ted
A
ATTENTION: Failure to set this parameter to a value appropriate for the intended application could result in
equipment damage and/or personal injury.
A
175 [Motor Rated Volt]
495 [Arm Volt Kp Base]
233 [Output Voltage]
496 [Arm Volt Ki Base]
466 [AC Line Voltage]
1052 [Output Power]
481 [Undervolt Thresh]
1374 [Fault Voltage]
A
A