Rockwell Automation 20P PowerFlex Digital DC Drive User Manual
Page 143
Rockwell Automation Publication 20P-UM001I-EN-P - February 2013
143
Programming and Parameters
Chapter 3
SP
EE
D
C
O
MMA
ND
Sp
eed Reg
u
la
to
r
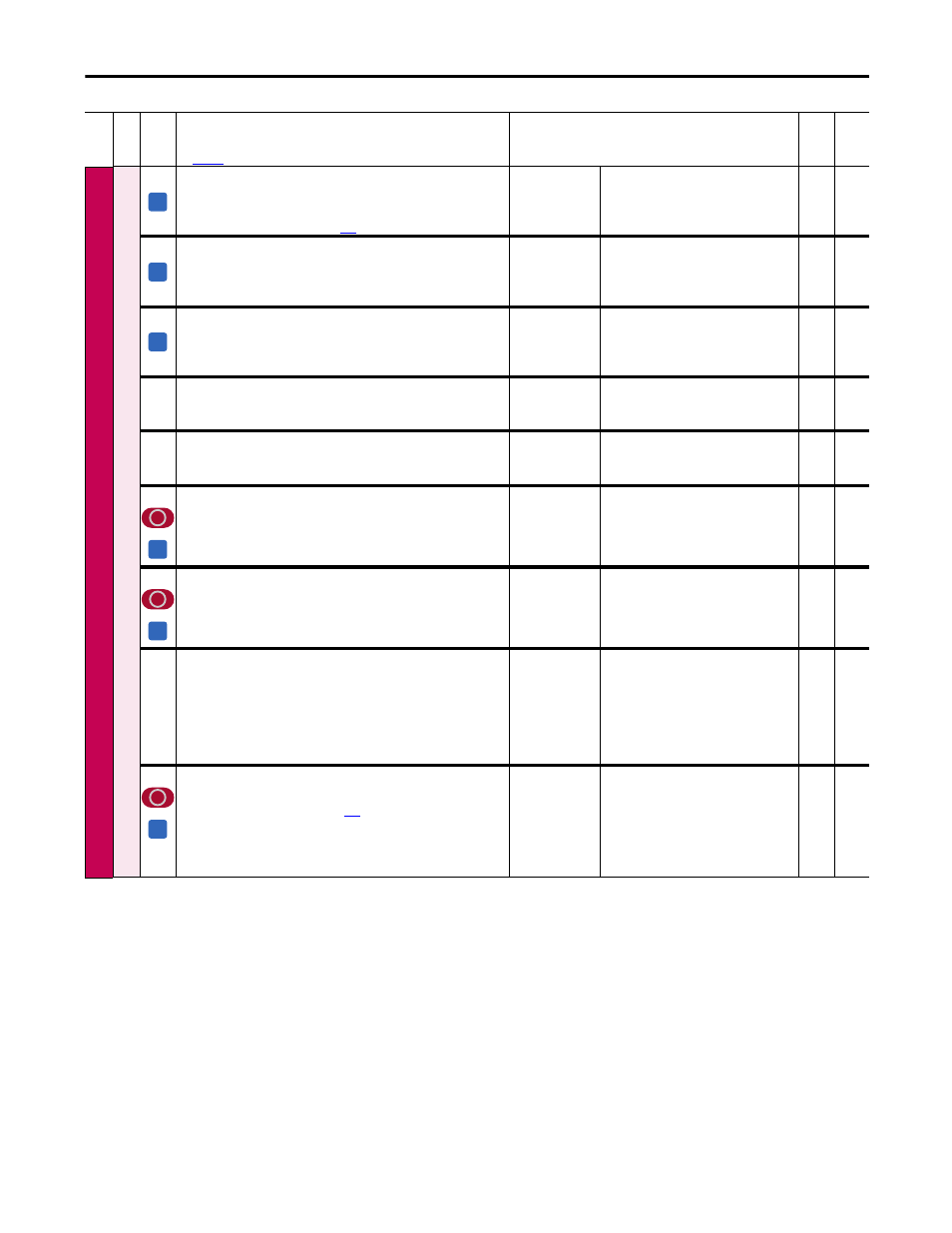
447
[Speed Up Filter]
The time constant of the filter for the D (derivative) component of the Speed
Up function.
Note: See Speed Up Function on page
for more information.
Default:
Min/Max:
Units:
0
0 / 1000
ms
16-bit
Int
459
[SpdReg Kp Bypass]
The proportional gain (K
P
) of the speed regulator, expressed as a percentage
of Par 93 [Spd Reg Kp Base], when an encoder or tachometer feedback signal
is changed to armature feedback (Par 458 [SpdReg FB Bypass] = “Enabled”).
Default:
Min/Max:
Units:
0.90 x P459
max
0.01 / Based on drive current rating
%
Real
458
460
[SpdReg Ki Bypass]
The integral gain (K
I
) of the speed regulator, expressed as a percentage of Par
94 [Spd Reg Ki Base], when an encoder or tachometer feedback signal is
changed to armature feedback (Par 458 [SpdReg FB Bypass] = “Enabled”).
Default:
Min/Max:
Units:
0.30
0.00 / 100.00
%
Real
458
493
[Arm Volt Kp]
Proportional gain (K
P
) of the field voltage regulator expressed as a
percentage of the value defined in Par 495 [Arm Volt Kp Base].
Default:
Min/Max:
Units:
30.00
0.00 / 100.00
%
Real
495
494
[Arm Volt Ki]
Integral gain (K
I
) of the field voltage regulator expressed as a percentage of
the value defined in Par 496 [Arm Volt Ki Base].
Default:
Min/Max:
Units:
40.00
0.00 / 100.00
%
Real
496
495
[Arm Volt Kp Base]
The proportional gain (K
P0
) of the field voltage regulator (base value).
Default:
Min/Max:
Units:
Based on drive current rating
0.10 / Based on drive current rating
A / V
Real
493
496
[Arm Volt Ki Base]
The integral coefficient (K
I0
) of the field voltage regulator (base value).
Default:
Min/Max:
Units:
0.90 x P496
max
0.01 / Based on drive current rating
A / V / ms
Real
494
643
[SpdReg AntiBckup]
Allows control of over-shoot/under-shoot in the step response of the speed
regulator. Over-shoot/under-shoot can be effectively
eliminated with a setting of 0.3, which will remove backup of the motor shaft
when zero speed is reached. This parameter has no affect on the drive's
response to load changes. A value of zero disables this feature.
Note: This parameter was added for firmware version 4.001.
Default:
Min/Max:
0.0
0.0 / 0.50
Real
1016 [SpdFuncSelect]
Selection of the “Speed Up” or “Inertia/Loss compensation” function.
Notes: See Speed Up Function on page
for more information. Option 2
“Off” added for firmware version 4.001.
Default:
Options:
2 =
0 =
1 =
2 =
“Off”
“Speed Up”
“Inertia/loss”
“Off”
16-bit
Int
444,
445,
447,
1012,
1013,
1014,
1015
Fil
e
Gr
oup
No
.
Parameter Name & Description
See
page 110
for symbol descriptions
Values
Da
ta
T
yp
e
Rela
ted
A
A
A
A
A
A