Rockwell Automation 20P PowerFlex Digital DC Drive User Manual
Page 141
Rockwell Automation Publication 20P-UM001I-EN-P - February 2013
141
Programming and Parameters
Chapter 3
SP
EED
C
O
MMAND
Speed Re
gula
to
r
107
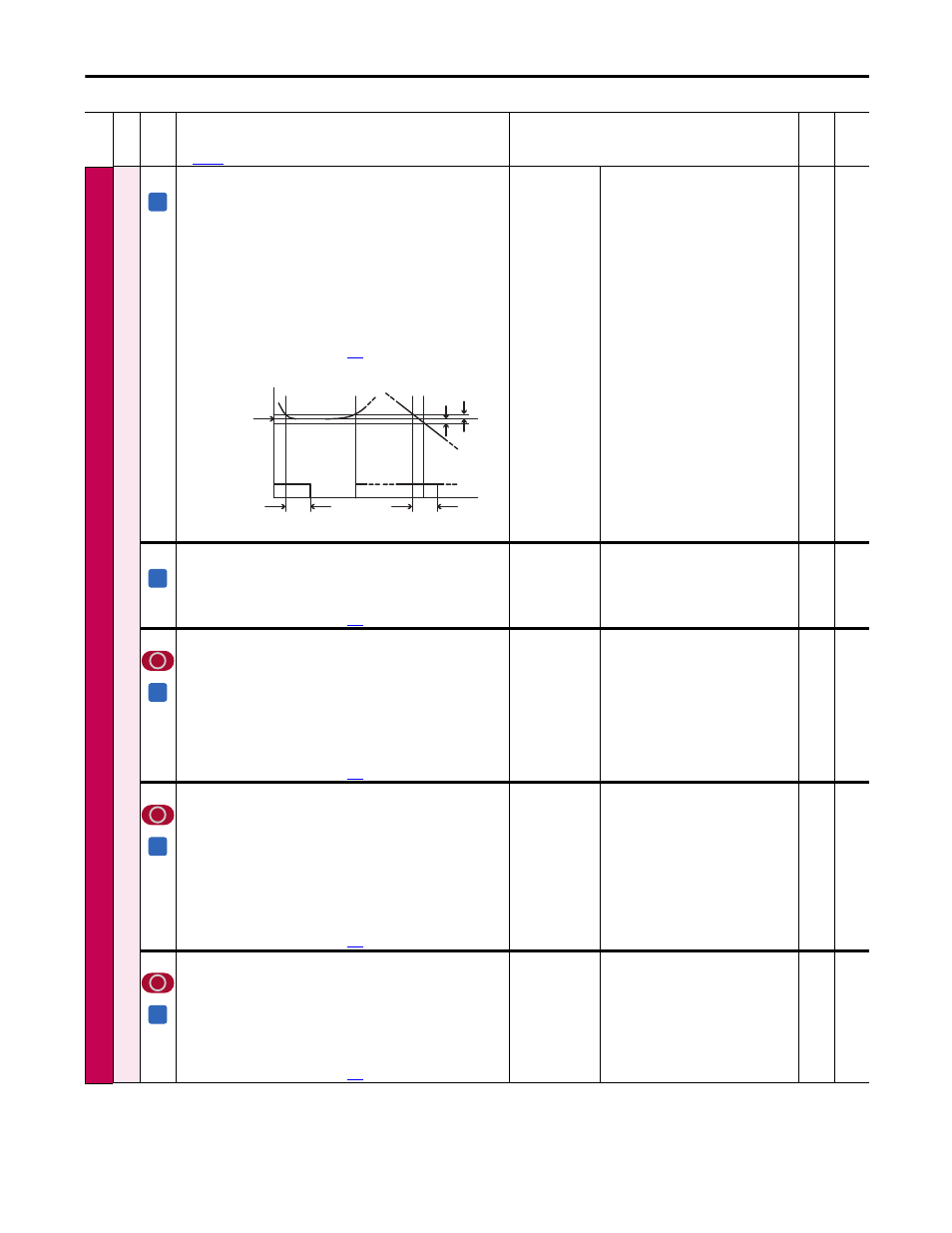
[Speed Zero Level]
Speed below which the actual speed is considered equal to zero. When a Stop
command is issued and actual speed goes below this value, drive output is
disabled. The value applies to both rotation directions for four quadrant
drives.
Notes: Setting the value of this parameter too low could prevent the proper
functioning of field economy. If Par 107 and/or Par 108 are changed from
their default values it can affect the Speed Loop autotune function (Par
1027). Ideally, these parameters should be set to defaults when autotuning
the Speed Loop. Values substantially different from defaults will result in a
autotuning fault.
Note: See Speed Zero Function on page
for more information.
Default:
Min/Max:
Units:
20
1 / 6000
rpm
16-bit
Int
395,
1027
108
[Speed Zero Delay]
Amount of time that must elapse after the actual speed goes below the value
set in Par 107 [Speed Zero Level] before Par 395 [At Zero Speed] changes
state.
Note: See Speed Zero Function on page
for more information.
Default:
Min/Max:
Units:
100
0 / 65535
ms
16-bit
Int
395,
1027
123
[Spd Zero I En]
Enables/Disables the output of the integral section of the speed regulator.
Used in the Zero Speed function.
• “Enabled” = The output of the integral section of the speed regulator is
set to zero when the speed reference and the speed feedback are equal to
zero. The I component is enabled when a reference value is entered to
restart acceleration.
• “Disabled” = Disables the output of the integral section of the speed
regulator.
Note: See Speed Zero Function on page
for more information.
Default:
Options:
0 =
0 =
1 =
“Disable”
“Disable”
“Enable”
16-bit
Int
124
[Spd Ref Zero En]
This parameter is only active when Par 125 [Spd Zero P En] = 1 “Enabled”.
Used in the Zero Speed function.
• “Enabled” = The proportional gain, equal to Par 126 [Spd Zero P Gain] at
zero speed, is equal to Par 87 [Spd Reg Kp] when the speed reference is
higher than the value defined in Par 106 [Ref Zero Level].
• “Disabled” = The proportional gain, equal to Par 126 [Spd Zero P Gain] at
zero speed, is equal to the value in Par 87 [Spd Reg Kp] when the speed
reference or the actual speed is higher than the value defined in Par 106
[Ref Zero Level].
Note: See Speed Zero Function on page
for more information.
Default:
Options:
0 =
0 =
1 =
“Disable”
“Disable”
“Enable”
16-bit
Int
125
[Spd Zero P En]
“Enabled” = When both the speed reference value and the actual speed
value = 0, the proportional gain value in Par 126 [Spd Zero P Gain] is active
after the delay time defined in Par 108 [Speed Zero Delay]. Used in the Zero
Speed function.
“Disabled” = The speed regulator keeps its proportional gain component
when the drive is stopped.
Note: See Speed Zero Function on page
for more information.
Default:
Options:
0 =
0 =
1 =
“Disable”
“Disable”
“Enable”
16-bit
Int
Fil
e
Gr
oup
No
.
Parameter Name & Description
See
page 110
for symbol descriptions
Values
Da
ta
T
yp
e
Rela
ted
A
Actual Speed
Par 107
[Speed Zero Level]
Par 108 [Speed Zero Delay]
Par 395
[At Zero Speed]
Fwd
Rev
Actual Speed = 0
A
A
A
A