Rockwell Automation 20P PowerFlex Digital DC Drive User Manual
Page 145
Rockwell Automation Publication 20P-UM001I-EN-P - February 2013
145
Programming and Parameters
Chapter 3
DYNAMIC C
O
N
TROL
Ramp Ra
tes
20
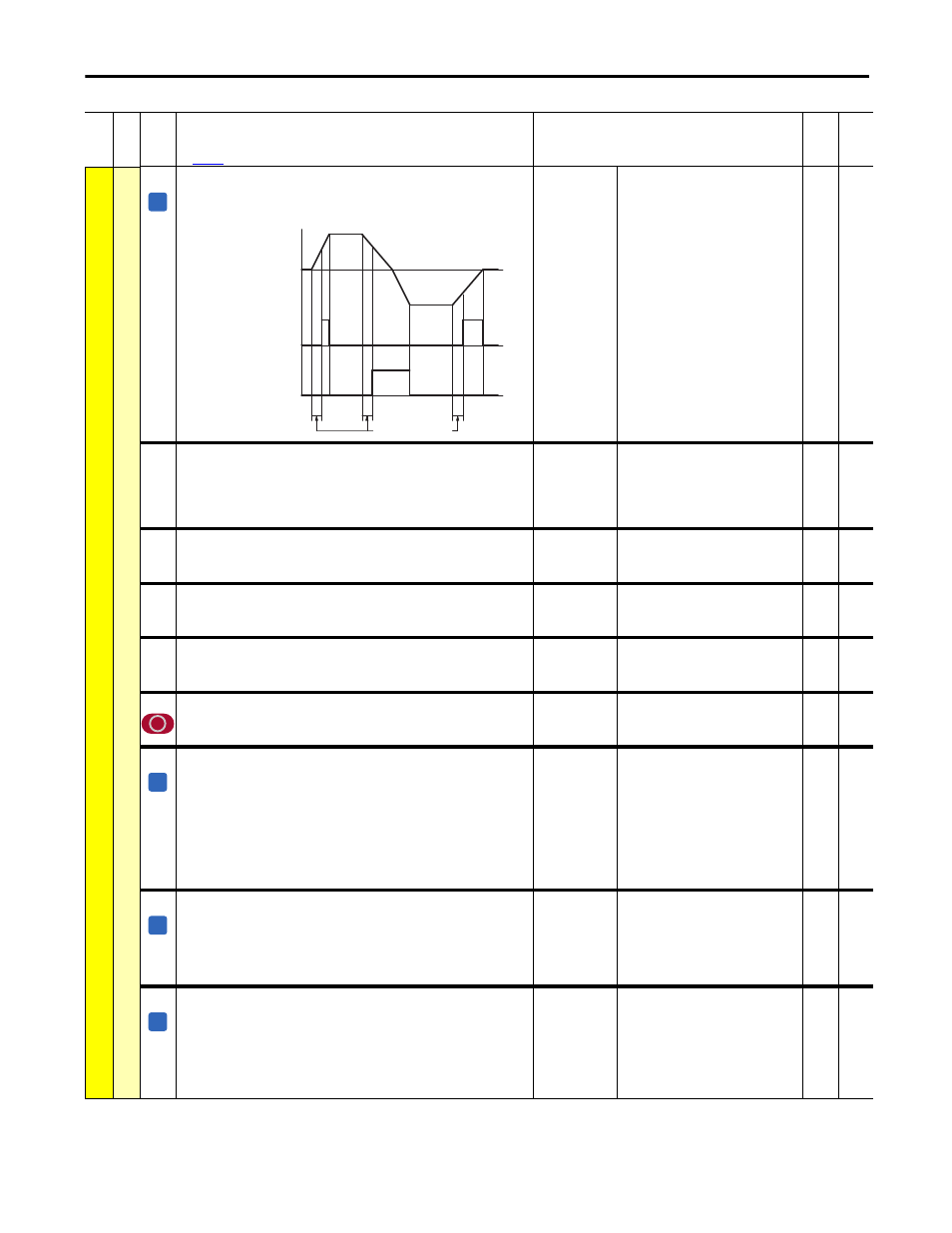
[Ramp Delay]
Defines a ramp delay time when the ramp is active. Works with par [Digital Outx
Sel] set to 6 “Ramp Pos” or 7 “Ramp Neg”.
Default:
Min/Max:
Units:
100
0 / 65535
ms
16-bit
Int
113,
346,
347
22
[MOP Accel Time]
The acceleration rate for the MOP reference in response to a digital input. The MOP
acceleration rate = Par 2 [Maximum Speed] / Par 22 [MOP Accel Time].
If “0” is entered in this parameter, the ramp output directly follows the reference
value.
Default:
Min/Max:
Units:
10
0 / 65535
s
16-bit
Int
2
24
[Accel Time 2]
Sets the rate of acceleration for linear ramp 2.
Acceleration rate for ramp 2 = Par 2 [Maximum Speed] / Par 24 [Accel Time 2].
Default:
Min/Max:
Units:
10
0 / 65535
s
16-bit
Int
2
30
[MOP Decel Time]
The deceleration rate for the MOP reference in response to a digital input. The MOP
deceleration rate = Par 2 [Maximum Speed] / Par 30 [MOP Decel Time].
Default:
Min/Max:
Units:
10
0 / 65535
s
16-bit
Int
2
32
[Decel Time 2]
Sets the rate of deceleration for linear ramp 2.
Deceleration rate for ramp 2 = Par 2 [Maximum Speed] / Par 32 [Decel Time 2].
Default:
Min/Max:
Units:
10
0 / 65535
s
16-bit
Int
2
245
[Speed Ramp En]
Enables or disables the ramp function. The Ramp Reference block is bypassed
when this parameter is set to 0 “Disabled”.
Default:
Options:
1 =
0 =
1 =
“Enabled”
“Disabled”
“Enabled”
16-bit
Int
344
[Zero Ramp Output]
Activates either the ramp output (1) or the brake function (0). When this
parameter is set to 0 “Active”, the drive brakes through the maximum available
torque and the motor will perform a Current Limit Stop. Two quadrant drives do
not support a brake option.
• “Active” = The ramp output is disabled and Pars 113 [Ramp Out] and 114
[Ramp Out Pct] are immediately set to zero.
• “Not Active” = The ramp output is enabled. and Pars 113 [Ramp Out] and 114
[Ramp Out Pct] follow the Ramp Reference block commands.
Default:
Options:
1 =
0 =
1 =
“Not Active”
“Active”
“Not Active”
16-bit
Int
345
[Zero Ramp Input]
Activates or deactivates the ramp input.
• “Active” = The ramp input is not active and Pars 110 [Ramp In] and 111 [Ramp
In Pct] = 0.
• “Not Active” = The ramp input is activated and Pars 110 [Ramp In] and 111
[Ramp In Pct] correspond to the set reference.
Default:
Options:
1 =
0 =
1 =
“Not Active”
“Active”
“Not Active”
16-bit
Int
110,
111
373
[Freeze Ramp]
Determines whether the last ramp output reference value is retained or whether
the ramp output reference value is active.
• “Active” = The value of the ramp output at the time of activation is retained
irrespective of any possible reference value changes at the ramp input.
• “Not Active” = The ramp output value follows the ramp input value according
to the Ramp Reference Block commands.
Default:
Options:
1 =
0 =
1 =
“Not Active”
“Active”
“Not Active”
16-bit
Int
Fil
e
Gr
oup
No
.
Parameter Name & Description
See
page 110
for symbol descriptions
Values
Da
ta
T
yp
e
Rela
ted
A
Par 113 [Ramp Out]
Par 346 [Torque Positive]
Par 347 [Torque Negative]
Par 20
[Ramp Delay]
A
A
A