Rockwell Automation 20P PowerFlex Digital DC Drive User Manual
Page 160
160
Rockwell Automation Publication 20P-UM001I-EN-P - February 2013
Chapter 3
Programming and Parameters
APPL
IC
AT
IONS
W
inder F
un
cti
ons
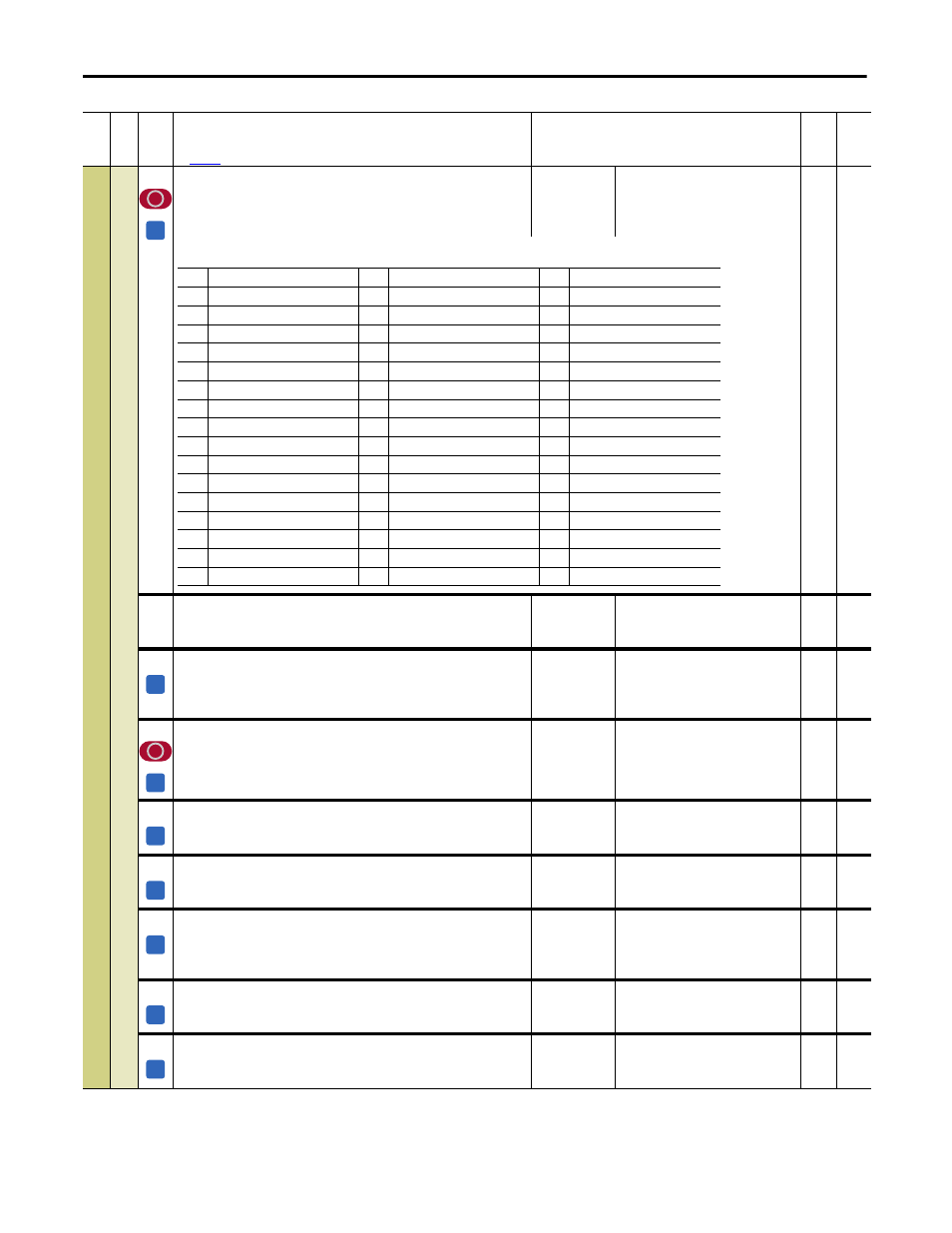
1210 [W Target]
Number of the parameter to which the winder speed reference is written.
Notes: Added options 0…47 for firmware version 4.001. Added option 48
“Reserved” for firmware version 5.002.
Default:
Min/Max:
0
0 / 65535
16-bit
Int
Options:
1212 [Acc Dec Filter]
Internal acceleration/deceleration calculation filter for the Torque Winder line
speed reference.
Default:
Min/Max:
Units:
30
0 / 5000
ms
16-bit
Int
1213 [Actual Comp]
Active compensation status (sums up the static, dynamic and inertial frictions) as a
percentage of the drive rated current.
Note: This parameter can be assigned to an analog output.
Default:
Min/Max:
Units:
Read Only
–/+200
%
16-bit
Int
1214 [Closed Loop En]
Enables/Disables closed loop tension control (used with a load cell).
Default:
Options:
0 =
0 =
1 =
“Disabled”
“Disabled”
“Enabled”
16-bit
Int
1215 [Speed Demand En]
Enables/Disables the speed reference calculation for the Torque Winder
application.
Default:
Options:
0 =
0 =
1 =
“Disabled”
“Disabled”
“Enabled”
16-bit
Int
1216 [Spd Match Torque]
Sets the torque current during the launching and change phase.
Default:
Min/Max:
Units:
100
0 / 200
%
16-bit
Int
1217 [W Reference]
Angular speed reference.
Note: This parameter can be assigned to an analog output; 10V = 100% of Par 45
[Max Ref Speed].
Default:
Min/Max:
Units:
Read Only
–/+8192
rpm
16-bit
Int
1160
1255 [Jog TW Speed]
Torque Winder jog reference. The parameter is entered as a percentage of Par 1160
[Line Speed Pct].
Default:
Min/Max:
Units:
0
0 / 100
%
16-bit
Int
1160
1256 [Jog TW Enable]
Enables/Disables the Torque Winder jog function.
Note: This parameter can be assigned to a digital input.
Default:
Options:
0 =
0 =
1 =
“Disabled”
“Disabled”
“Enabled”
16-bit
Int
Fil
e
Gr
oup
No
.
Parameter Name & Description
See
page 110
for symbol descriptions
Values
Da
ta
T
yp
e
Rela
ted
A
0 =
“Not Used”
17 = “Max Fld Pct” (Par 467)
34 = “UsrDefined15” (Par 518)
1 =
“Cur Lim Pos” (Par 8)
18 = “Reserved”
35 = “Load Comp” (Par 698)
2 =
“Cur Lim Neg” (Par 9)
19 = “UsrDefined0” (Par 503)
36 = “Out Volt Lvl” (Par 921)
3 =
“Reserved”
20 = “UsrDefined1” (Par 504)
37 = “Reserved”
4 =
“Reserved”
21 = “UsrDefined2” (Par 505)
38 = “Speed Ratio” (Par 1017)
5 =
“TrqRedCurLim” (Par 13)
22 = “UsrDefined3” (Par 506)
39 = “Reserved”
6 =
“Torque Ref” (Par 39)
23 = “UsrDefined4” (Par 507)
40 = “Reserved”
7 =
“Trim Torque” (Par 40)
24 = “UsrDefined5” (Par 508)
41 = “Tension Red” (Par 1179)
8 =
“Reserved”
25 = “UsrDefined6” (Par 509)
42 = “Reserved”
9 =
“Trim Ramp” (Par 42)
26 = “UsrDefined7” (Par 510)
43 = “Reserved”
10 = “Trim Speed” (Par 43)
27 = “UsrDefined8” (Par 511)
44 = “CloseLp Comp” (Par 1208)
11 = “Reserved”
28 = “UsrDefined9” (Par 512)
45 = “Reserved”
12 = “Reserved”
29 = “UsrDefined10” (Par 513)
46 = “Reserved”
13 = “Reserved”
30 = “UsrDefined11” (Par 514)
47 = “Reserved”
14 = “Adaptive Ref” (Par 183)
31 = “UsrDefined12” (Par 515)
48 = “Reserved”
15 = “Reserved”
32 = “UsrDefined13” (Par 516)
16 = “Reserved”
33 = “UsrDefined14” (Par 517)
A
A
A
A
A
A
A