Motor control file – Rockwell Automation 20P PowerFlex Digital DC Drive User Manual
Page 123
Rockwell Automation Publication 20P-UM001I-EN-P - February 2013
123
Programming and Parameters
Chapter 3
Motor Control File
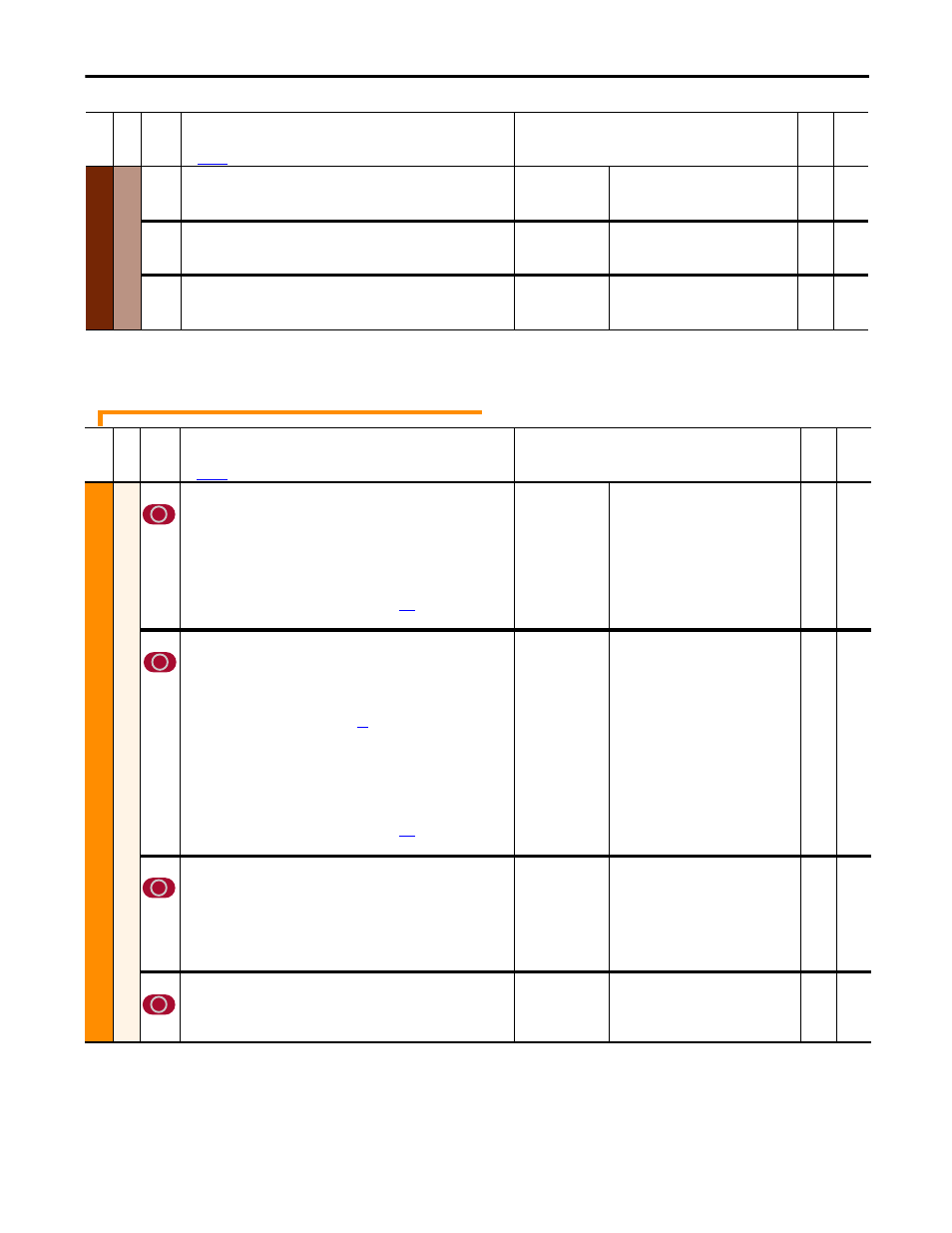
MONIT
O
R
D
ri
ve Da
ta
466
[AC Line Voltage]
AC input voltage.
Default:
Min/Max:
Units:
Read Only
0 / 960
Vac
16-bit
Int
588
[AC Line Freq]
AC input frequency.
Default:
Min/Max:
Units:
Read Only
0.00 / 70.00
Hz
Real
1052
[Output Power]
Output power.
Note: This parameter can be assigned to an analog output.
Default:
Min/Max:
Units:
Read Only
0.00 / 9999.99
kW
Real
Fil
e
Gr
oup
No
.
Parameter Name & Description
See
page 110
for symbol descriptions
Values
Da
ta
T
yp
e
Rela
ted
Fi
le
Grou
p
No
.
Parameter Name & Description
for symbol descriptions
Values
Da
ta T
ype
Rela
ted
MOT
O
R C
ONTROL
M
otor D
ata
45
[Max Ref Speed]
Highest speed reference that can be commanded. The value of this parameter
also scales external speed reference values (rpm) to internal units (counts),
including analog inputs (10V = Par 45 rpm). Rated motor speed is
determined via Par 456 [Fld Weaken Ratio] when field weakening is used. If
field weakening is not used, set this parameter to the motor base speed.
Notes: If a speed feedback device is used (encoder, resolver, or tachometer),
see Drive Reference and Feedback Scaling on page
for instructions. The
maximum value was changed from “16383” for firmware version 3.001.
Default:
Min/Max:
Units:
1750
1 / 6000
rpm
32-bit
Int
2,
456
162
[Max Feedback Spd]
Specifies the scaling between internal (counts) and external speed feedback
values. Typically, this parameter is set to the same value as Parameter 45
[Max Ref Speed]. If an analog (DC) tachometer is used, this parameter's value
must be set to be compatible with the S4 switches on the control board (see
DIP Switch and Jumper Settings on page
). If armature voltage feedback is
used, this parameter must be set to the motor nameplate base speed. Par 585
[Overspeed Val] should be set 10% higher than the value entered into Par
162. Rated motor speed is determined via Par 456 [Fld Weaken Ratio] when
field weakening is used. If field weakening is not used, set this parameter to
the motor base speed.
Notes: If a speed feedback device is used (encoder, resolver, or tachometer),
see Drive Reference and Feedback Scaling on page
for instructions. The
maximum value was changed from “16383” for firmware version 3.001.
Default:
Min/Max:
Units:
1750.00
1.00 / 6000
rpm
Real
169,
414,
456,
458,
585
175
[Rated Motor Volt]
Maximum armature voltage of the drive. Typically, this value is set to the
Motor Nameplate Armature voltage. When Par 469 [Field Mode Sel] is set to 1
= “Field Weaken”, the value in this parameter equals the voltage at which the
field weakening phase begins.
Note: This parameter affects the threshold of an overvoltage condition, as
indicated by an “Arm Overvoltage” fault (F5).
Default:
Min/Max:
Units:
240.0
20.0 / 999.0
V
Real
162,
169,
469,
481
179
[Nom Mtr Arm Amps]
Rated motor nameplate armature current. The settings for the current limit
and the overload function are based on this current value. Also, this value
should be greater than 1/3 the value of Par 465 [Drive Size].
Default:
Min/Max:
Units:
Based on drive current rating
0.10 / Based on drive current rating
A
Real
465