Rockwell Automation 20P PowerFlex Digital DC Drive User Manual
Page 159
Rockwell Automation Publication 20P-UM001I-EN-P - February 2013
159
Programming and Parameters
Chapter 3
APPL
IC
AT
IONS
Win
der Fun
ct
io
ns
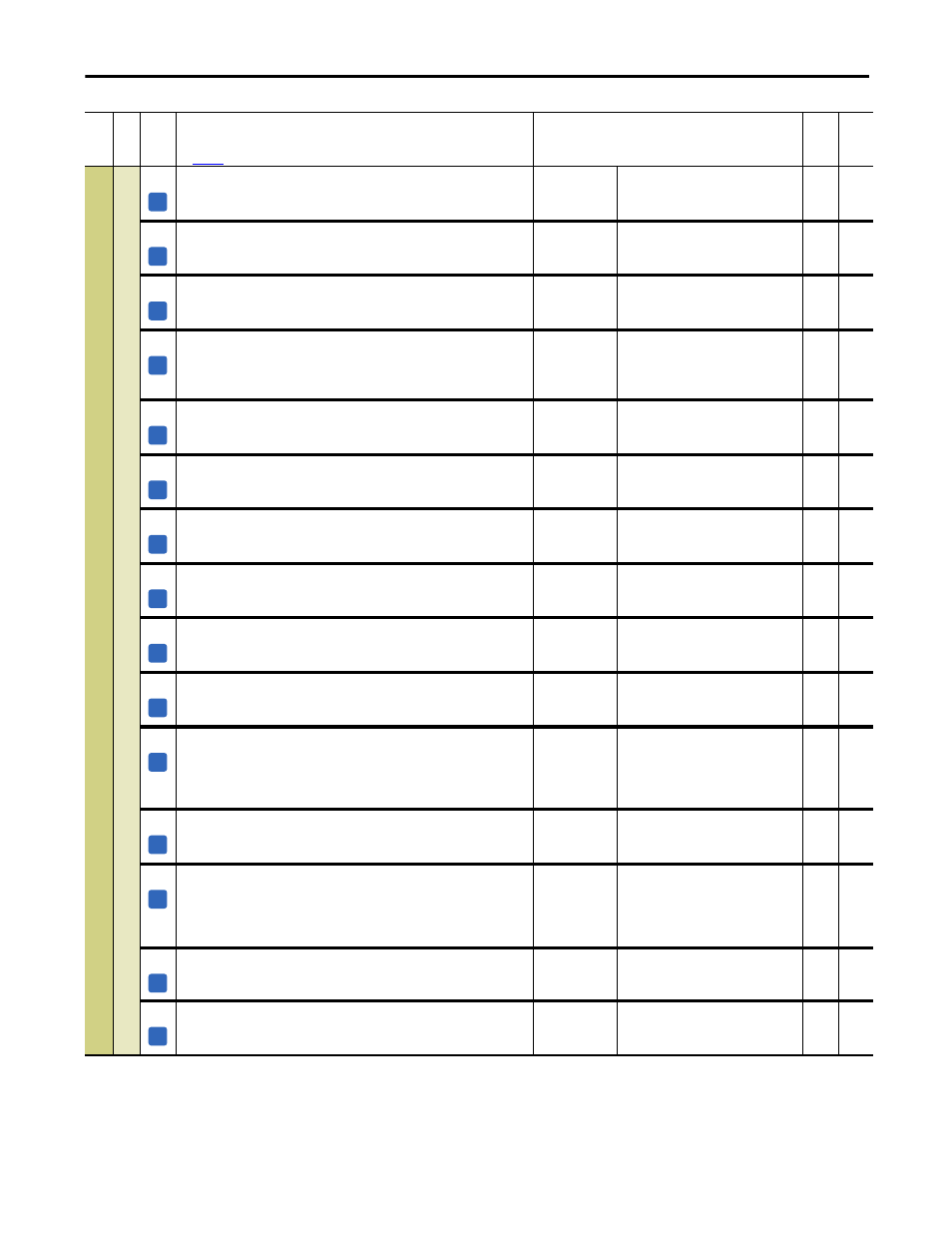
1191 [InertiaCompCnst]
Displays the active compensation of the fixed section as a percentage of the drive
rated current.
Default:
Min/Max:
Units:
Read Only
0.00 / 200.00
%
Real
1192 [InertiaCompVar]
Displays the active compensation of the variable section as a percentage of the
drive rated current.
Default:
Min/Max:
Units:
Read Only
0.00 / 200.00
%
Real
1193 [Torq Current Pct]
Displays the amount of torque current required.
Note: This parameter can be assigned to an analog output.
Default:
Min/Max:
Units:
Read Only
0.00 / 200.00
%
Real
1194 [Act Ten Ref Pct]
Displays the percentage of tension reference less the Taper percentage set via Par
1179 [Tension Reduct]. If the Taper function is not enabled, it corresponds to the
value displayed in Par 1180 [Tension Ref].
Default:
Min/Max:
Units:
Read Only
0.00 / 199.99
%
Real
1179,
1180
1195 [Speed Match]
Coil “launching” phase command for automatic switching.
Note: This parameter can be assigned to a digital input or output.
Default:
Options:
0 =
0 =
1 =
“Off”
“Off”
“On”
16-bit
Int
1196 [Spd Match Acc]
Motor acceleration time during the launching phase.
Default:
Min/Max:
Units:
83.88
0.30 / 300.00
s
Real
1197 [Spd Match Dec]
Motor deceleration time. If the motor decelerates during the launching phase a
stop command is issued.
Default:
Min/Max:
Units:
83.88
0.30 / 300.00
s
Real
1198 [Offs Accel Time]
Ramp time for the initial phase when the machine is stopped. It refers to Par 45
[Max Ref Speed].
Default:
Min/Max:
Units:
83.88
0.30 / 300.00
s
Real
1199 [W Offset]
Speed reference offset for the initial phase of the winder/unwinder when the line
is stopped.
Default:
Min/Max:
Units:
0
0 / 1000
rpm
16-bit
Int
1200 [Spd Match Gain]
Speed reference gain during the launching phase. 100% corresponds to a
peripheral speed equal to the line speed.
Default:
Min/Max:
Units:
100
0 / 150
%
16-bit
Int
1201 [Winder Side]
Selection of the winding/unwinding side.
• “0” = Up
• “1” = Down
Note: This parameter can be assigned to a digital input.
Default:
Min/Max:
0
0 / 1
16-bit
Int
1202 [W Gain]
Sets the speed reference gain used to saturate the speed loop. This parameter is a
percentage of the increasing/decreasing value of the angular speed reference.
Default:
Min/Max:
Units:
0
0 / 100
%
16-bit
Int
1203 [Spd Match Compl]
Indicates a completed launching ramp. If this parameter is assigned to a
programmed digital output, it can be used to indicate that the coil can be changed.
• “1” = Launching ramp completed
• “0” = Launching ramp not completed
Default:
Min/Max:
Read Only
0 / 32767
16-bit
Int
1208 [Close Loop Comp]
Active compensation status (output of the PID regulator).
Default:
Min/Max:
Read Only
– / +32767
16-bit
Int
1209 [Torque Winder En]
Enables/disables the center winder function.
Default:
Options:
0 =
0 =
1 =
“Disabled”
“Disabled”
“Enabled”
16-bit
Int
Fil
e
Gr
oup
No
.
Parameter Name & Description
See
page 110
for symbol descriptions
Values
Da
ta
T
yp
e
Rela
ted
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A