Rockwell Automation 20P PowerFlex Digital DC Drive User Manual
Page 135
Rockwell Automation Publication 20P-UM001I-EN-P - February 2013
135
Programming and Parameters
Chapter 3
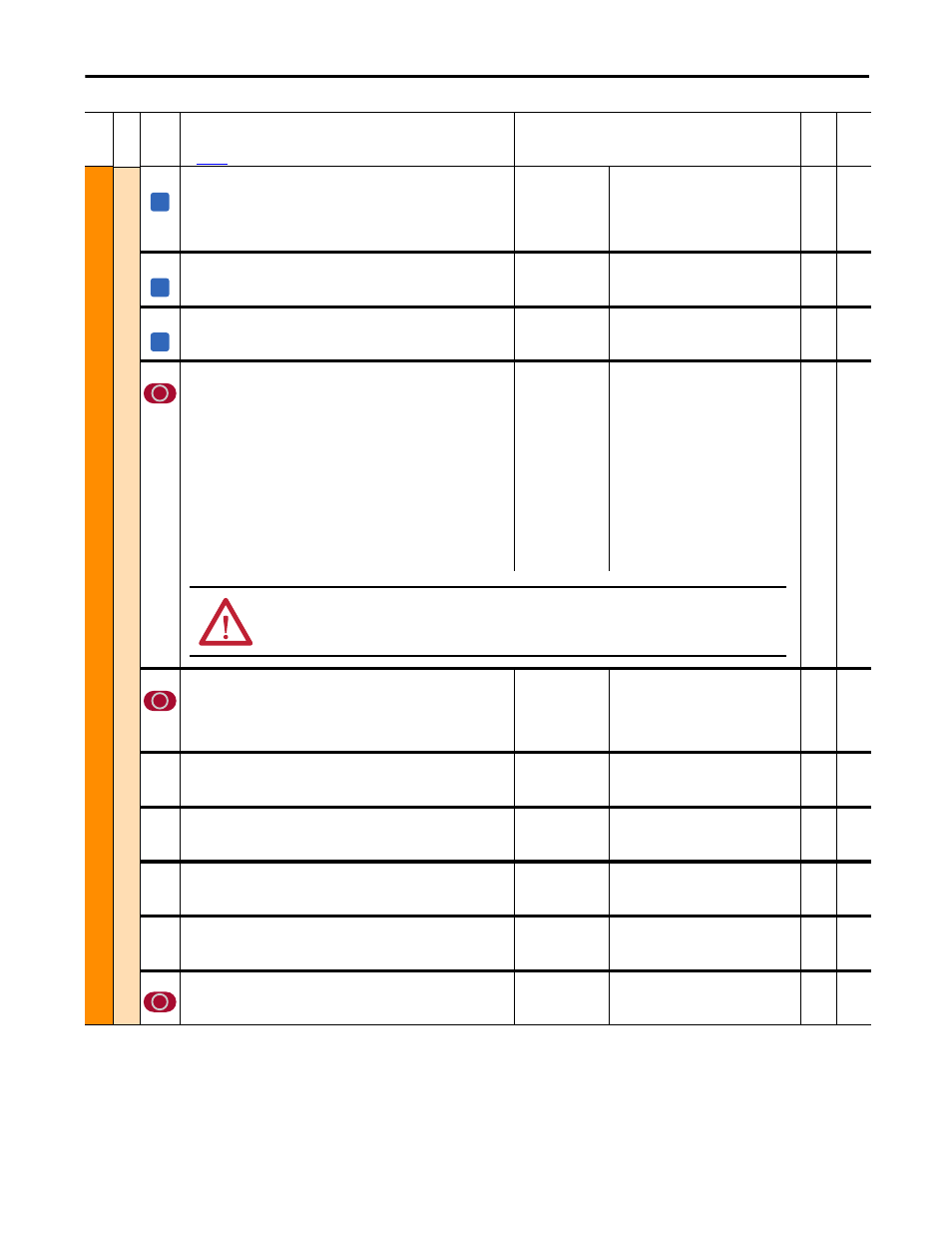
MO
TOR C
ONTROL
Au
tot
u
ne
1013
[Torque Const]
The Motor torque constant used to calculate inertia and friction
compensation. This value is determined during speed auto tuning. Torque
Const = EMF/Sb. It should be the same as Motor Rated Torque / Motor Full
Load Amps.
Default:
Min/Max:
Units:
Based on motor current rating
0.01 / 99.99
N•m/A
Real
1014
[Inertia]
Motor inertia value.
1 Kg•m
2
= 23.76 lb•ft
2
Default:
Min/Max:
Units:
Based on drive current rating (Par 179)
0.001 / 999.999
Kg•m
2
Real
1015
[Friction]
Motor friction value.
1 N•m = 0.738 lb•ft
Default:
Min/Max:
Units:
Based on drive current rating (Par 179)
0.000 / 99.990
N•m
Real
1027
[Spd Reg Autotune]
Starts the auto tuning procedure for the speed regulator. Setting this
parameter to 1 “On” and pressing “Start” on the HIM keypad initiates the
speed regulator auto tuning procedure. When the auto tuning procedure is
complete, this parameter automatically resets to 0 “Off”. This test should be
run with inertia connected to the motor (if present), but without process load
(i.e., material).
Speed Regulator Autotune assumes full field is applied. Verify Pars 280 [Nom
Mtr Fld Amps] and 467 [Max Fld Curr Pct] are set correctly. Tuning with less
than full field current will result in different gains because of the lower motor
torque values.
Note: Non-default values for Par 107 [Speed Zero Level] or Par 108 [Speed
Zero Delay] can interfere with successful Speed Loop autotuning.
Default:
Options:
0 =
0 =
1 =
“Off”
“Off”
“On”
16-bit
Int
280,
467
1029
[Speed Tune Dir]
Choice of the rotation direction of the motor shaft (rotation, as seen from the
motor shaft side) for the speed regulator auto tuning procedure.
• “Forward” = Clockwise rotation
• “Reverse” = Counter-clockwise rotation
Default:
Options:
1 =
1 =
2 =
“Forward”
“Forward”
“Reverse”
16-bit
Int
1030
[Spd Tune Inertia]
Motor inertia value identified during the speed regulator auto tuning
procedure.
Default:
Min/Max:
Units:
Read Only
0.001 / 999.990
Kg x m
2
Real
1031
[SpdTune Friction]
Motor friction value identified during the speed regulator auto tuning
procedure.
Default:
Min/Max:
Units:
Read Only
0.00 / 99.99
N•m
Real
1032
[Speed Tune Kp]
Proportional gain value of the speed regulator identified during the speed
regulator auto tuning procedure.
Default:
Min/Max:
Read Only
0.00 / 100.00
Real
1033
[Speed Tune Ki]
Integral gain value of the speed regulator identified during the speed
regulator auto tuning procedure.
Default:
Min/Max:
Read Only
0.00 / 100.00
Real
1048
[Autotune Cur Lim]
Value of the torque current limit applied during the speed regulator auto
tuning procedure.
Default:
Min/Max:
Units:
20
0 / Based on drive current rating
%
16-bit
Int
Fil
e
Gr
oup
No
.
Parameter Name & Description
See
page 110
for symbol descriptions
Values
Da
ta
T
yp
e
Rela
ted
A
A
A
ATTENTION: The motor will rotate during the Speed Regulator tuning procedure. A hazard of personal injury exists
due to motor shaft rotation and/or machinery motion.