Step 15, Figure 58 – Rockwell Automation 20P PowerFlex Digital DC Drive User Manual
Page 100
100
Rockwell Automation Publication 20P-UM001I-EN-P - February 2013
Chapter 2
Drive Start Up
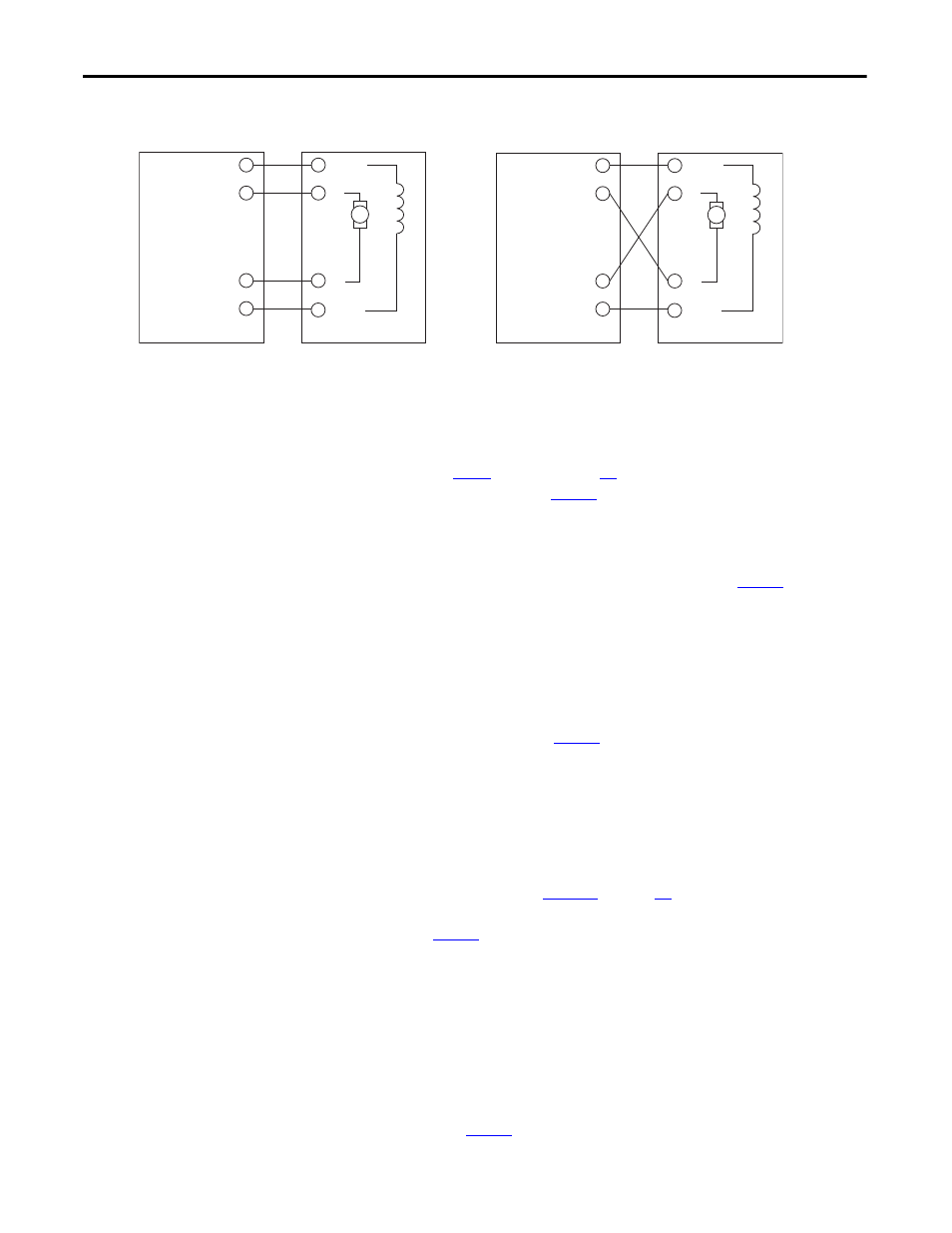
Figure 58 - Motor Connections
13.
Apply power to the drive.
14.
… step 9 on page
. When the motor rotation direction is
correct, continue with
15.
Complete the appropriate procedure below based on the type of
feedback device used for the application:
❏ For armature voltage feedback - Continue with
below.
❏ For analog tachometer feedback - Assert a Jog command and verify
that the sign and value of Par 1408 [Tachometer Speed]
corresponds with the actual direction of the motor. If the sign and
value of Par 1408 [Tachometer Speed] and the motor direction do
not correspond, remove power from the drive and reverse the
tachometer connections at the drive. Verify proper motor rotation
and continue with
below.
❏ For encoder feedback - Assert a Jog command and verify that the
sign and value of Par 420 [Encoder Speed] correspond with the
actual direction of the motor. If the sign and value of [Par 420
[Encoder Speed] and the motor direction do not correspond,
remove power from the drive and reverse the encoder connections at
the drive. Reverse the polarity of only one channel, for example, B
and B NOT. See
for digital encoder terminal
block designations. Verify proper motor rotation and continue with
below.
❏ For resolver feedback - Assert a Jog command and verify that the
sign and value of Par 428 [Resolver Speed] correspond with the
actual direction of the motor. If the sign and value of Par 428
[Resolver Speed] and the motor direction do not correspond,
change the setting of bit 5 “Resolver Dir” in Par 425 [Resolver
Config], or remove power from the drive and verify the correct
resolver connections to the drive (refer to resolver installation
instructions for details). Verify proper motor rotation and continue
with
below.
C1 (+)
C (+)
D (-)
D1 (-)
PowerFlex DC
Motor
F1 (+)
A1
A2
F2 (-)
(2)
(2)
C1 (+)
C (+)
D (-)
D1 (-)
PowerFlex DC
Motor
F1 (+)
A1
A2
F2 (-)
(2)
(2)
Straight Shunt Machine,
CCW Rotation Facing Commutator End
Straight Shunt Machine,
CW Rotation Facing Commutator End