Rockwell Automation 20P PowerFlex Digital DC Drive User Manual
Page 147
Rockwell Automation Publication 20P-UM001I-EN-P - February 2013
147
Programming and Parameters
Chapter 3
DY
NAMIC C
O
NTROL
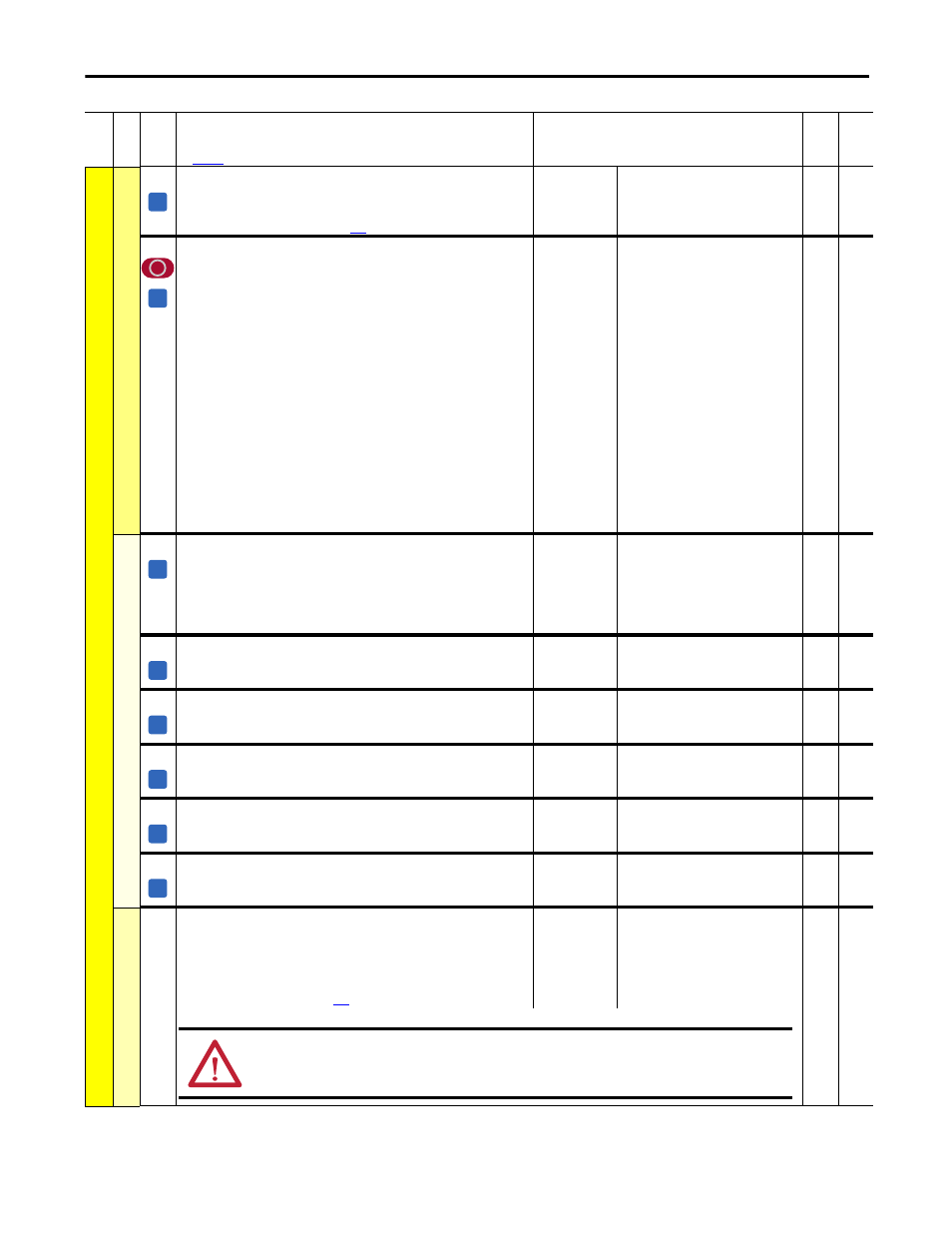
Load Limits
700
[Droop Limit]
The speed reference correction range within which the droop function becomes
active.
Note: See Droop Compensation on page
for more information.
Default:
Min/Max:
Units:
1750
0 / Par 45 [Max Ref Speed]
rpm
16-bit
Int
715
[Torq Limit Type]
This parameter determines the response of the drive during a current limiting
condition.
• “T Lim PosNeg” = The active positive torque limit is set by the value defined in
Par 7 [Current Limit] and the active negative torque limit is set by the value
defined in Par 9 [Current Lim Neg].
• “T Lim MtrGen” = With this option the following three conditions apply:
1. If the motor speed is greater than +1% of Par 162 [Max Feedback Spd], the
active positive torque limit is set by the value defined in Par 8 [Current Lim
Pos] and the active negative torque limit is set by the value defined in Par 9
[Current Lim Neg].
2. If the motor speed is less than –1% of Par 162 [Max Feedback Spd] the
active positive torque limit is set by the value defined in Par 9 [Current Lim
Neg] and the active negative torque limit is set by the value defined in Par 8
[Current Lim Pos].
3. If the motor speed is greater than –1% of Par 162 [Max Feedback Spd] and
less than +1% of Par 162 [Max Feedback Spd] the active positive and
negative torque limits are set by the value defined in Par 8 [Current Lim Pos].
Note: The option names were corrected to those shown above for firmware version
4.001.
Default:
Options:
0 =
0 =
1 =
“T Lim PosNeg”
“T Lim PosNeg”
“T Lim MtrGen”
16-bit
Int
7,
8,
9,
162
St
op
M
od
es
38
[Fast Stop Time]
The amount of time to decelerate the drive to a complete stop and disable the
drive. The deceleration rate for Fast stop = [Maximum Speed] / [Fast Stop Time].
This feature can be used when [Digital Inx Sel] is set to 30 “Fast Stop” or when
certain alarms are configured for “Fast Stop”. See Pars 354 [Aux Inp Flt Cfg] and 365
[OverTemp Flt Cfg].
Default:
Min/Max:
Units:
10
0 / 65535
s
16-bit
Int
354,
365
627
[Spd 0 Trip Delay]
The amount of time that will elapse after the drive reaches zero speed before it is
disabled.
Default:
Min/Max:
Units:
0
0 / 40000
ms
16-bit
Int
1262 [Closing Speed]
Motor speed at which the brake is closed. Used with External Brake Control.
Default:
Min/Max:
Units:
30
0 / 200
rpm
16-bit
Int
1263 [Opening Delay]
Amount of time before the brake will open after the drive has been enabled. Used
with External Brake Control.
Default:
Min/Max:
Units:
0
0 / 30000
ms
16-bit
Int
1265 [Ramp In Zero En]
Enables/Disables the setting of the ramp input to zero. Used with External Brake
Control.
Default:
Options:
0 =
0 =
1 =
“Disabled”
“Disabled”
“Enabled”
16-bit
Int
1266 [Actuator Delay]
Amount of time before the actuator releases the load. Used with External Brake
Control.
Default:
Min/Max:
Units:
0
0 / 30000
ms
16-bit
Int
Res
ta
rt
Mo
des
1344 [Start At Powerup]
Enables/Disables the ability to issue a “Run” command and automatically resume
running at commanded speed after drive input power is restored and the time in
Par 1345 [Powerup Delay] has elapsed. Requires a digital input configured for
“Run” and a valid start condition.
Note: See Start At Powerup on page
for more information.
Default:
Options:
0 =
0 =
1 =
“Disabled”
“Disabled”
“Enabled”
16-bit
Int
1345
Fil
e
Gr
oup
No
.
Parameter Name & Description
See
page 110
for symbol descriptions
Values
Da
ta
T
yp
e
Rela
ted
A
A
A
A
A
A
A
A
ATTENTION: Equipment damage and/or personal injury may result if this parameter is used in an inappropriate
application. Do not use this function without considering applicable local, national and international codes, standards,
regulations or industry guidelines.