Rockwell Automation 20P PowerFlex Digital DC Drive User Manual
Page 146
146
Rockwell Automation Publication 20P-UM001I-EN-P - February 2013
Chapter 3
Programming and Parameters
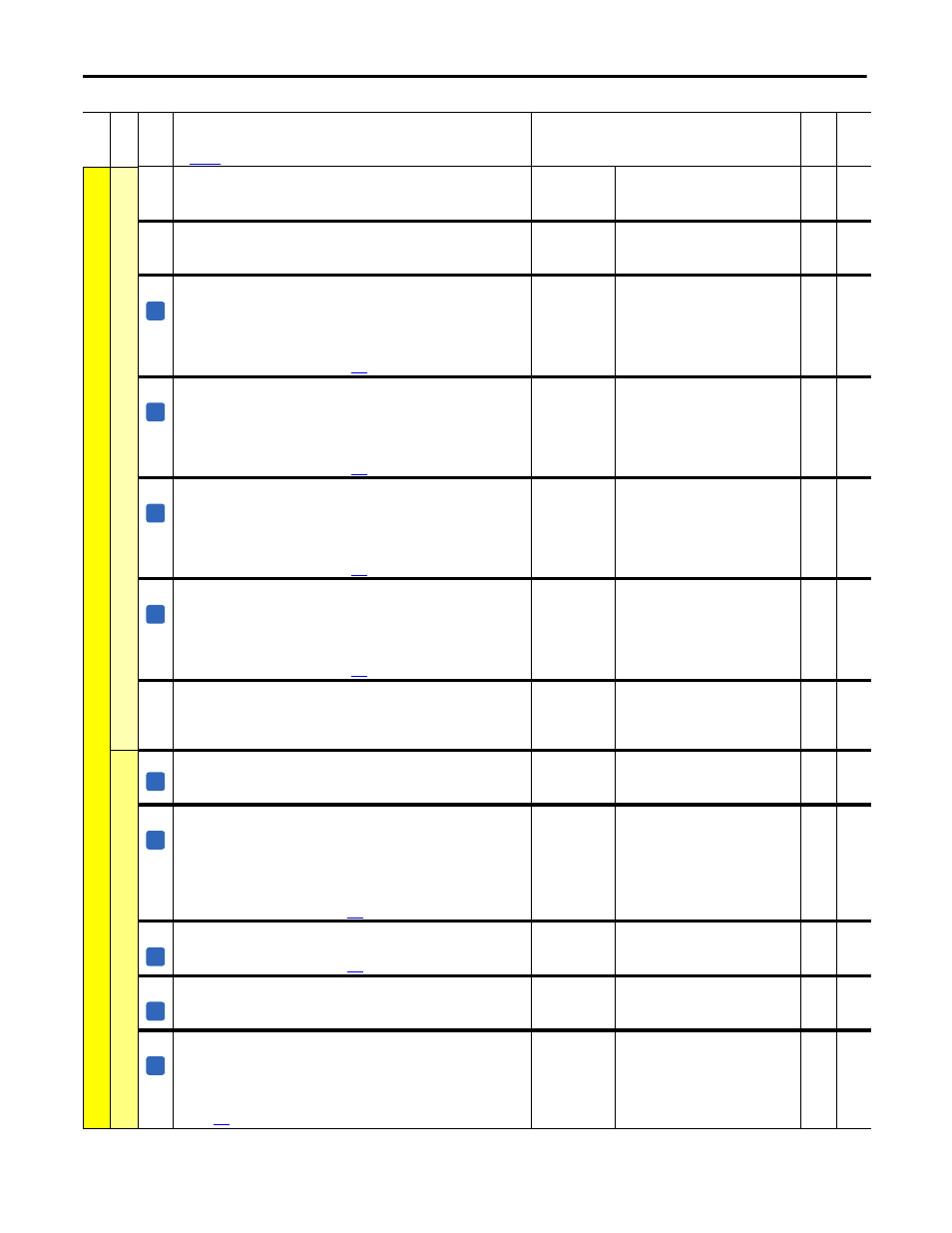
DYN
A
MIC C
O
NTROL
Ramp
Ra
tes
660
[Accel Time 1]
Sets the rate of acceleration for linear ramp 1.
Acceleration rate for ramp 1 = Par 2 [Maximum Speed] / Par 660 [Accel Time 1].
Default:
Min/Max:
Units:
10
0 / 65535
s
16-bit
Int
2
662
[Decel Time 1]
Sets the rate of deceleration for linear ramp 1.
Deceleration rate for ramp 1 = Par 2 [Maximum Speed] / Par 662 [Decel Time 1].
Default:
Min/Max:
Units:
10
0 / 65535
s
16-bit
Int
2
665
[S Curve Accel 1]
Amount of time (approximately half at the start and half at the end) applied to the
S-curve during Accel 1 changes. When Par 19 [S Curve Time] is changed this
parameter is automatically set to the same value. For asymmetrical S-curve ramps,
set this parameter after [S Curve Time] is changed.
Note: See S-curve Configuration on page
for more information.
Default:
Min/Max:
Units:
1.00
0.10 / 15.00
s
Real
19
666
[S Curve Decel 1]
Amount of time (approximately half at the start and half at the end) applied to the
S-curve during Decel 1 changes. When Par 19 [S Curve Time] is changed this
parameter is automatically set to the same value. For asymmetrical S-curve ramps,
set this parameter after [S Curve Time] is changed.
Note: See S-curve Configuration on page
for more information.
Default:
Min/Max:
Units:
1.00
0.10 / 15.00
s
Real
19
667
[S Curve Accel 2]
Amount of time (approximately half at the start and half at the end) applied to the
S-curve during Accel 2 changes. When Par 19 [S Curve Time] is changed this
parameter is automatically set to the same value. For asymmetrical S-curve ramps,
set this parameter after [S Curve Time] is changed.
Note: See S-curve Configuration on page
for more information.
Default:
Min/Max:
Units:
1.00
0.10 / 15.00
s
Real
19
668
[S Curve Decel 2]
Amount of time (approximately half at the start and half at the end) applied to the
S-curve during Decel 2 changes. When Par 19 [S Curve Time] is changed this
parameter is automatically set to the same value. For asymmetrical S-curve ramps,
set this parameter after [S Curve Time] is changed.
Note: See S-curve Configuration on page
for more information.
Default:
Min/Max:
Units:
1.00
0.10 / 15.00
s
Real
19
1410 [Jog Ramp Time]
Sets the rate of acceleration and deceleration while the Jog function is active. The
Jog rate = Par 2 [Maximum Speed] / Par 1410 [Jog Ramp Time].
Note: This parameter was added for firmware version 2.001.
Default:
Min/Max:
Units:
10
0 / 65535
s
16-bit
Int
2
Lo
ad
Li
m
it
s
13
[Torq Red CurLim]
The armature current limit, defined as a percentage of the value defined in Par 179
[Nom Mtr Arm Amps] when Par 342 [Torque Reduction] is set to 1 “Active”.
Default:
Min/Max:
Units:
100
0 / 200
%
16-bit
Int
342
696
[Droop Percent]
Droop function gain is a percentage of the ratio between Par 45 [Max Ref Speed]
and the difference of Par 698 [Load Comp] – Par 41 [Current Reg In]. Therefore,
when the difference between Par 698 [Load Comp] and Par 41 [Current Reg In] =
100% and Par 696 [Droop Percent] = 100%, the speed reference correction signal
is equal to Par 45 [Max Ref Speed].
Note: See Droop Compensation on page
for more information.
Default:
Min/Max:
Units:
0.00
0.00 / 100.00
%
Real
41,
45,
698
697
[Droop Filter]
Droop filter time constant for the Droop function.
Note: See Droop Compensation on page
for more information.
Default:
Min/Max:
Units:
0
0 / 1000
ms
16-bit
Int
698
[Load Comp]
The load compensation signal. This value is typically equal to the “master” drive’s
current. The load compensation signal is a percentage of I
dn
.
Default:
Min/Max:
Units:
0
+ / –200
%
16-bit
Int
699
[Enable Droop]
Enables/Disables the Droop function.
• “Enabled” = The Droop function is enabled.
• “Disabled” = The Droop function is disabled.
Notes: This parameter can be assigned to a digital input. See Droop Compensation
on page
for more information.
Default:
Options:
0 =
0 =
1 =
“Disabled”
“Disabled”
“Enabled”
16-bit
Int
Fil
e
Gr
oup
No
.
Parameter Name & Description
See
page 110
for symbol descriptions
Values
Da
ta
T
yp
e
Rela
ted
A
A
A
A
A
A
A
A
A