Burkert Type 8693 User Manual
Page 243
243
General Rules (Appendix)
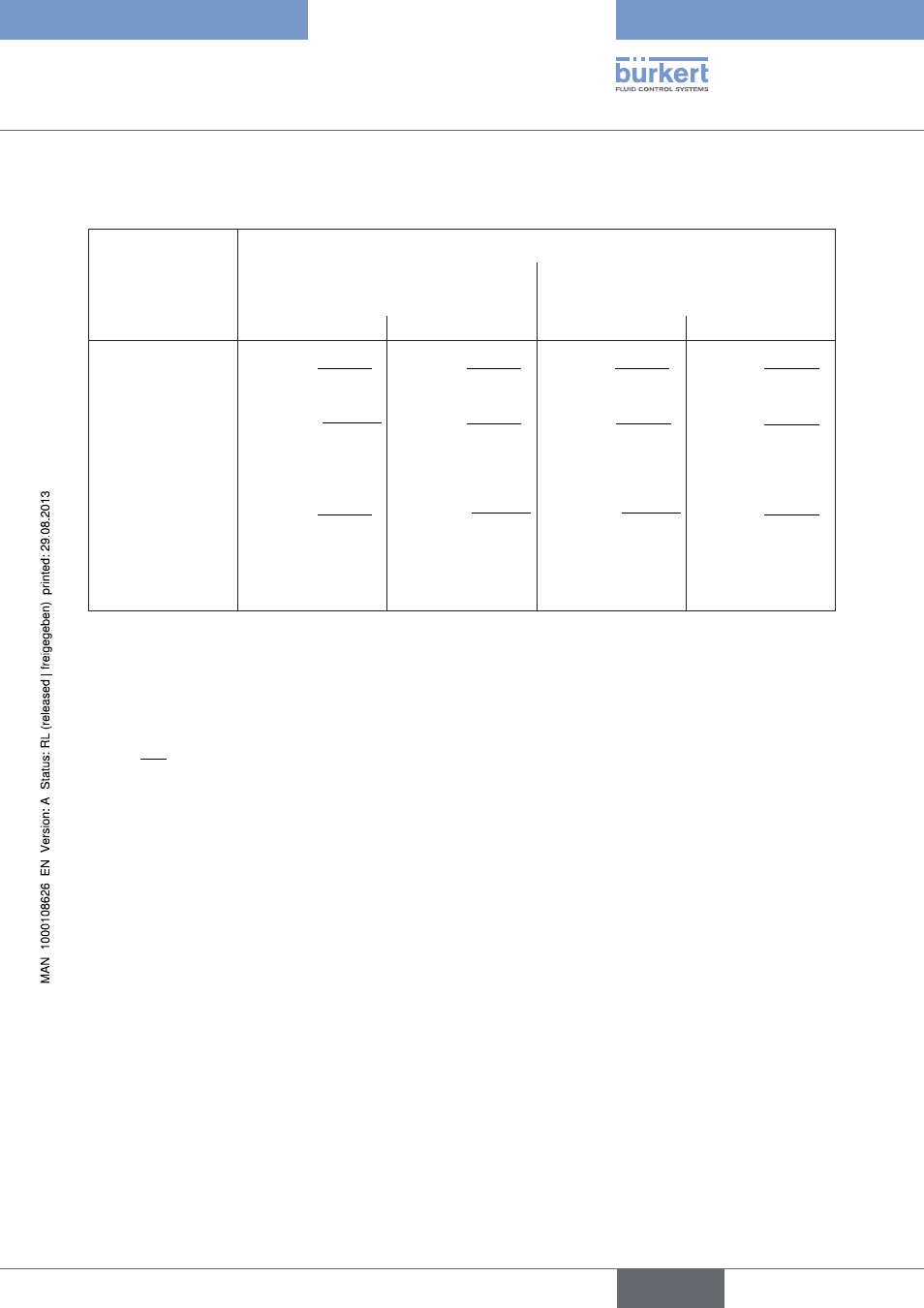
Adjustment.of.the.parameters.according.to.Chien,.hrones.and.reswick
Adjustment of the parameters
Controller type
for aperiodic control process
(0 % overshoot)
for control process
with 20 % overshoot
Reference
Malfunction
Reference
Malfunction
P controller
s
K
u
T
g
T
7
0
p
K
⋅
⋅
= ,
s
K
u
T
g
T
7
0
p
K
⋅
⋅
= ,
s
K
u
T
g
T
7
0
p
K
⋅
⋅
= ,
s
K
u
T
g
T
7
0
p
K
⋅
⋅
= ,
PI controller
s
K
u
T
g
T
1,2
p
K
⋅
⋅
=
s
K
u
T
g
T
1,2
p
K
⋅
⋅
=
s
K
u
T
g
T
1,2
p
K
⋅
⋅
=
s
K
u
T
g
T
7
0
p
K
⋅
⋅
= ,
u
T
0,42
v
T
⋅
=
u
T
2
n
T
⋅
=
g
T
n
T =
u
T
0,42
v
T
⋅
=
PID controller
s
K
u
T
g
T
1,2
p
K
⋅
⋅
=
s
K
u
T
g
T
1,2
p
K
⋅
⋅
=
s
K
u
T
g
T
1,2
p
K
⋅
⋅
=
s
K
u
T
g
T
1,2
p
K
⋅
⋅
=
g
T
n
T =
u
T
0,42
v
T
⋅
=
u
T
0,42
v
T
⋅
=
u
T
2
n
T
⋅
=
u
T
0,42
v
T
⋅
=
u
T
0,42
v
T
⋅
=
u
T
0,42
v
T
⋅
=
u
T
0,42
v
T
⋅
=
Table 70:
Adjustment of the parameters according to Chien, Hrones and Reswick
The proportionality factor Ks of the controlled system is calculated as follows:
(11)
Y
X
s
K
∆
∆
=
english
Type 8692,8693