Adjustment.rules.for.pid.controllers, Adjustment rules for pid controllers – Burkert Type 8693 User Manual
Page 240
240
General Rules (Appendix)
58.
adjusTmenT rules fOr pid
cOnTrOllers
The regulatory literature includes a series of adjustment rules which can be used in experimental ways to determine
a favorable setting for the controller parameters. To avoid incorrect settings, always observe the conditions under
which the particular adjustment rules have been drawn up. Apart from the properties of the control process and the
controller itself, whether a change in the disturbance variable or command variable is to be corrected.
58.1. adjustment rules according to ziegler and nichols
(oscillation method)
With this method the controller parameters are adjusted on the basis of the behavior of the control circuit at the
stability limit. The controller parameters are first adjusted so that the control circuit starts to oscillate. The occurring
critical characteristic values suggest a favorable adjustment of the controller parameters. A prerequisite for the
application of this method of course is that the control circuit is oscillated.
Procedure
→
Set controller as P-controller (i.e. Tn = 999, Tv = 0), first select a low value for Kp
→
Set required set-point value
→
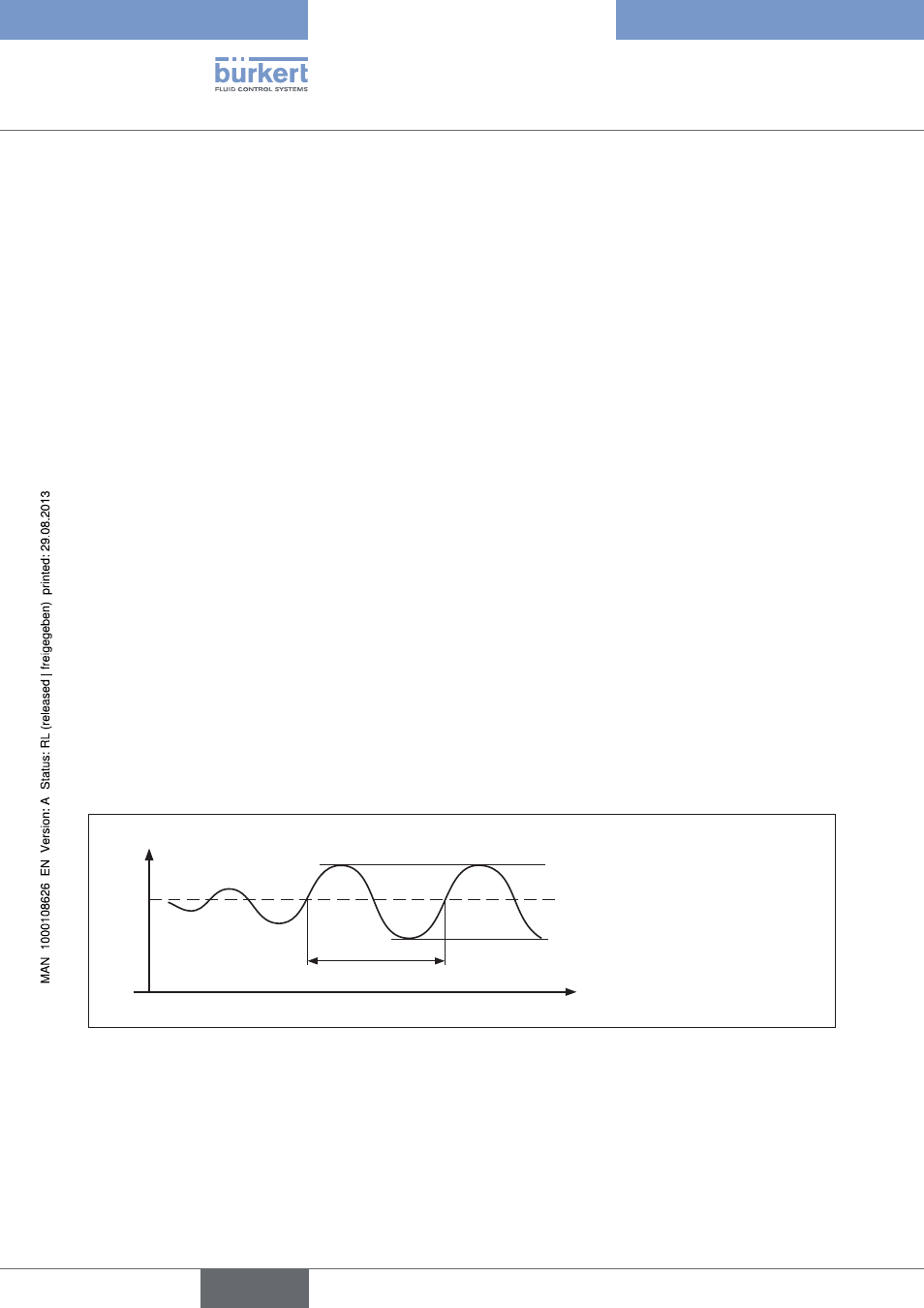
Increase Kp until the control variable initiates an undamped continuous oscillation.
The proportionality coefficient (amplification factor) set at the stability limit is designated as K
krit
. The resulting oscil-
lation duration is designated as T
krit
.
Progress.of.the.control.variable.at.the.stability.limit
X
Time
Tkrit t
Actual value
Figure 139: Progress of the control variable PID
english
Type 8692,8693