Safepos input the safety position – Burkert Type 8693 User Manual
Page 112
112
Start-up and operation of the
position controller Type 8692
22.3.11. SAFEPOS
input the safety position
This function specifies the actuator safety position which is started at defined signals.
The set safety position is only started
• if there is a corresponding signal on the binary input
(Configuration see chapter “21.3.13.
BINARY-IN Activation of the binary input”) or
• if a signal fault occurs
(Configuration see chapter “21.3.12.
SIG-ERROR Configuration of signal level fault detection”).
In the case of the bus version (Profibus / DeviceNet) the safety position is also started with
• corresponding parameter telegram
•
BUS ERROR (adjustable)
If the mechanical stroke range is limited with the
X.LIMIT function, only safety positions within these limits
can be started.
This function is executed in AUTOMATIC mode only.
Factory setting: 0 %
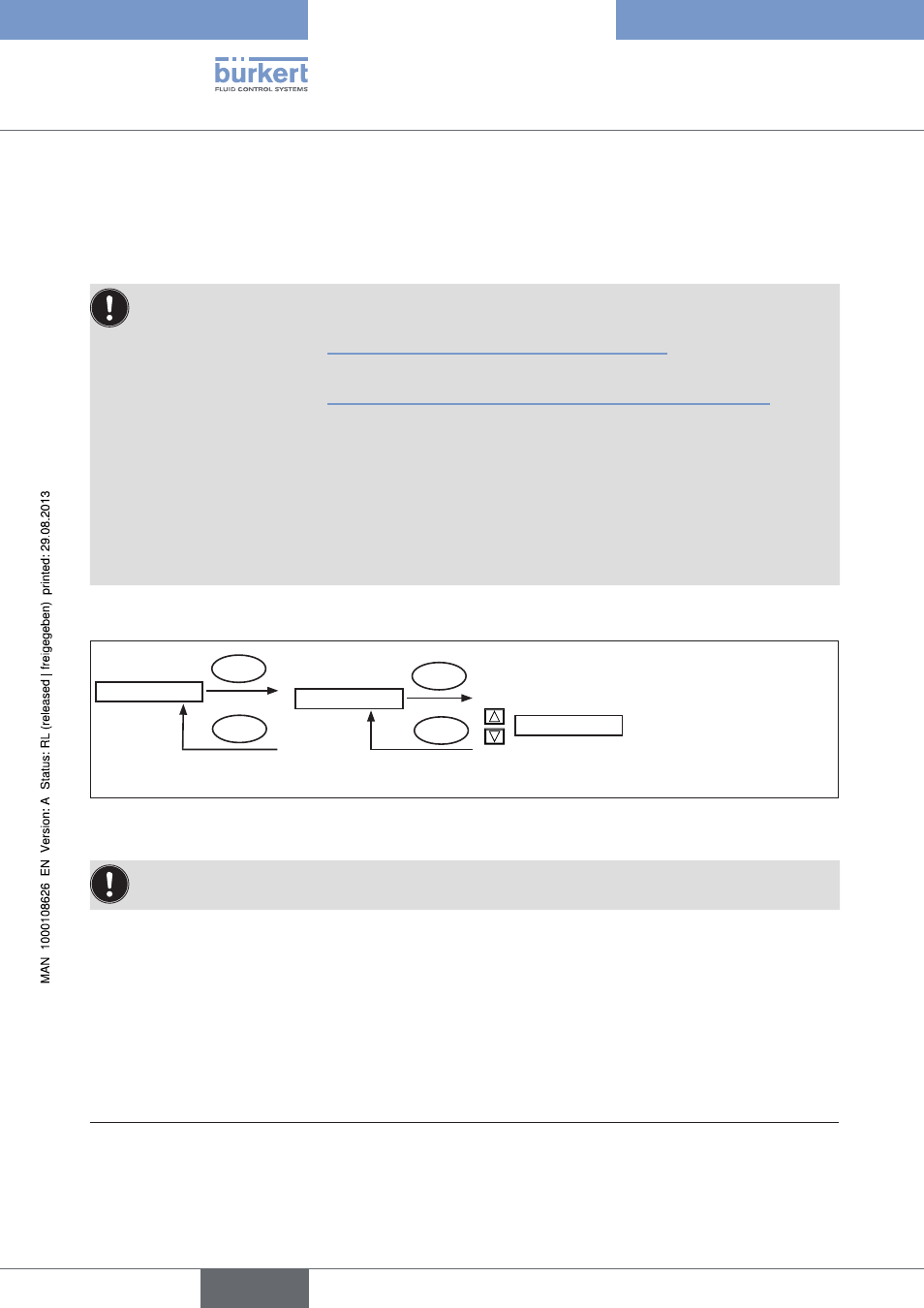
Safepos
Safepos 0%
EXIT
ENTER
INPUT
+
-
Safepos 0
OK
29)
Input the safety position
Adjustment range:
0...100 %
30)
Figure 65:
Operating structure SAFEPOS
Changed values are not transferred into the memory (EEPROM) until the main menu (MAIN) is left.
29)
If the sub-menu is left by pressing the selection key on the left (ESC), the value remains unchanged.
30)
If the safety position is 0 % or 100 %, the actuator is completely deaerated or aerated as soon as the safety
position SIG-ERROR or BINARY-IN is active in the auxiliary functions.
english
Type 8692, 8693