Vlocation transformation function – Adept AdeptSight Reference Guide User Manual
Page 30
VLOCATION transformation function
Syntax
MicroV+
VLOCATION
(sequence_id, tool_id, instance_id, result_id, index_id, frame_id)
V+
VLOCATION
(
$ip
, sequence_id, tool_id, instance_id, result_id, index_id, frame_id)
Description
Returns a Cartesian transform result of the execution of the specified vision sequence. The returned value
is a transform result: x, y, z, yaw, pitch, roll.
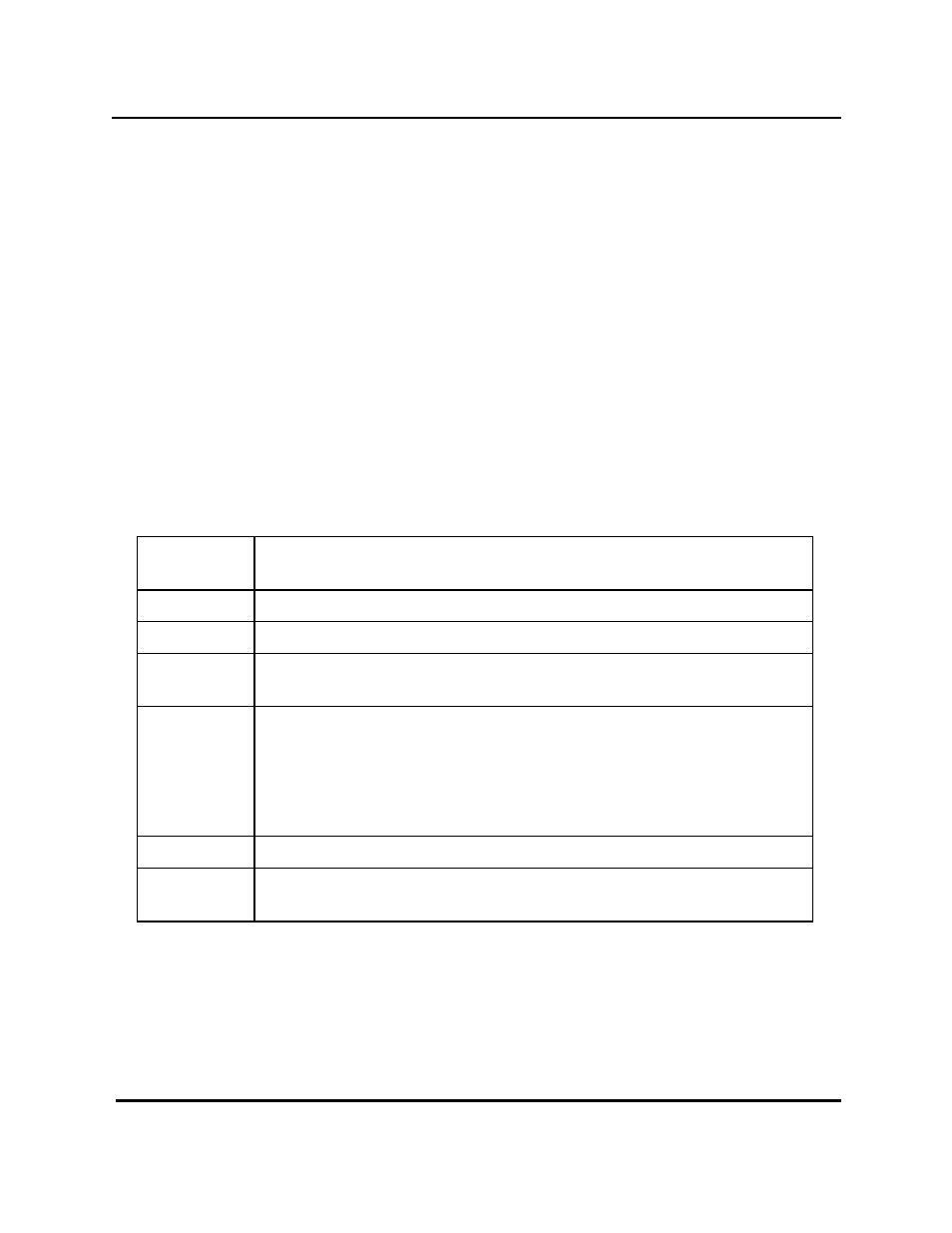
Parameters
$ip
IP address of the vision server. Applies to V+ syntax only. Uses standard IP
address format, for example: 192.168.1.120.
sequence_id
Index of the vision sequence. The first sequence is 1.
tool_id
Index of the tool in the vision sequence. The first tool is 1.
instance_id
Index of the instance in the specified result frame. If no result frame is specified,
it is the index for all instances returned by the tool.
result_id
Identifier (ID) of the result. Refer to the AdeptSight Properties Quick Reference
tables to find the ID for the required result.
Typically this value = 1311.
For gripper offset location, this value can be set to 1400 and incremented by 1
for each additional gripper offset. The maximum value is 1499. See Example 2.
index_id
Reserved for internal use. Value is always 1.
frame_id
Index of the frame for which you want to retrieve the result contained in the
specified instance.
Details
The following parameters are optional: sequence_id, tool_id, instance_id, index_id, and frame_id.
These parameters are 1-based. If no value is provided for these parameters, they default to 1.
For V+ systems, the vision server is the PC on which the AdeptSight vision software is running.
VLOCATION transformation function
AdeptSight Reference Guide, v3.2.x, Updated: 5/8/2012
Page 30