1 overload characteristics, 2 starting and stopping time, 5 ser – Yaskawa SGDS Sigma III Servo Amplifier User Manual
Page 70
3.5 SERVOPACK Overload Characteristics and Load Moment of Inertia
3-13
3.5 SERVOPACK Overload Characteristics and Load Moment of
Inertia
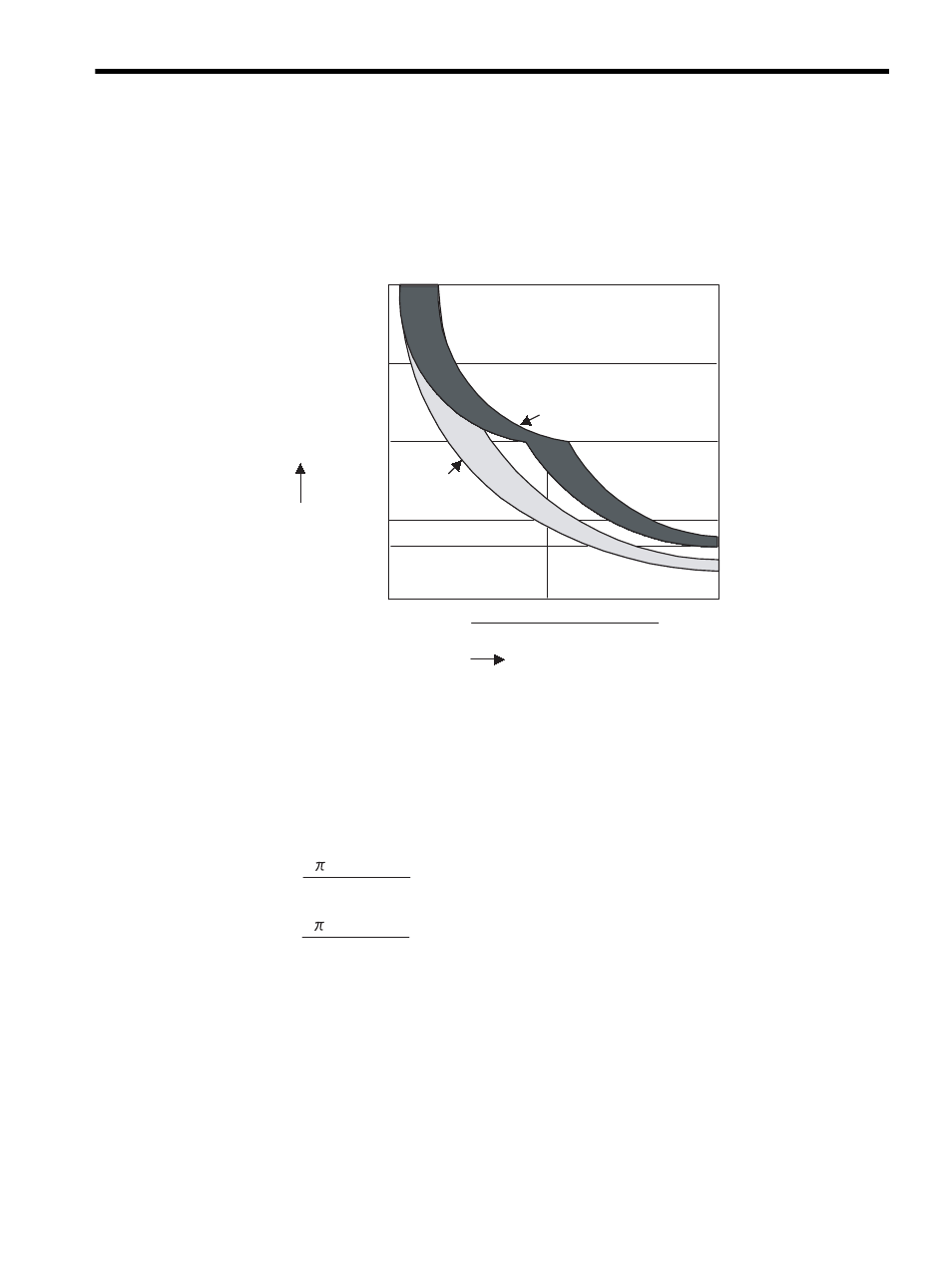
3.5.1 Overload Characteristics
The overload detection level is set under hot start conditions at a servomotor ambient temperature of 40
°C
(104
°F).
Note: The overload protection characteristics of A and B in the figure are applicable when the SERVO-
PACK is combined with one of the following servomotors.
A: SGMAH or SGMPH servomotor with a capacity of 400 W max.
B: Others like the SGMAH, SGMPH, and SGMSH servomotors
3.5.2 Starting and Stopping Time
The motor starting time (tr) and stopping time (tf) under a constant load are calculated using the following
formulas. Motor viscous torque and friction torque are ignored.
10000
1000
100
10
5
1
Operating time (s)
Rated torque
Maximum torque
Motor torque
B
A
Approx.
Rated torque
+
Maximum torque
2
N
M
:
Motor speed (RPM)
J
M
:
Motor rotor moment of inertia (kg m
2
)
J
L
:
Load converted to shaft moment of inertia (kg m
2
)
T
PM
:
Instantaneous peak motor torque when combined with a SERVOPACK
(N m)
T
L
:
Load torque (N m)
tr =
2 N
M
(J
M
+ J
L
)
60 (T
PM
− T
L
)
[s]
tf =
2 N
M
(J
M
+ J
L
)
60 (T
PM
+ T
L
)
[s]
Starting time:
Stopping time: