28 external input positioning (ex_posing: 39h), 28 extern, 28 external input positioning (ex_posing: 39h) -34 – Yaskawa SGDS Sigma III Servo Amplifier User Manual
Page 165
6 MECHATROLINK II Communications
6.3.28 External Input Positioning (EX_POSING: 39H)
6-34
6.3.28 External Input Positioning (EX_POSING: 39H)
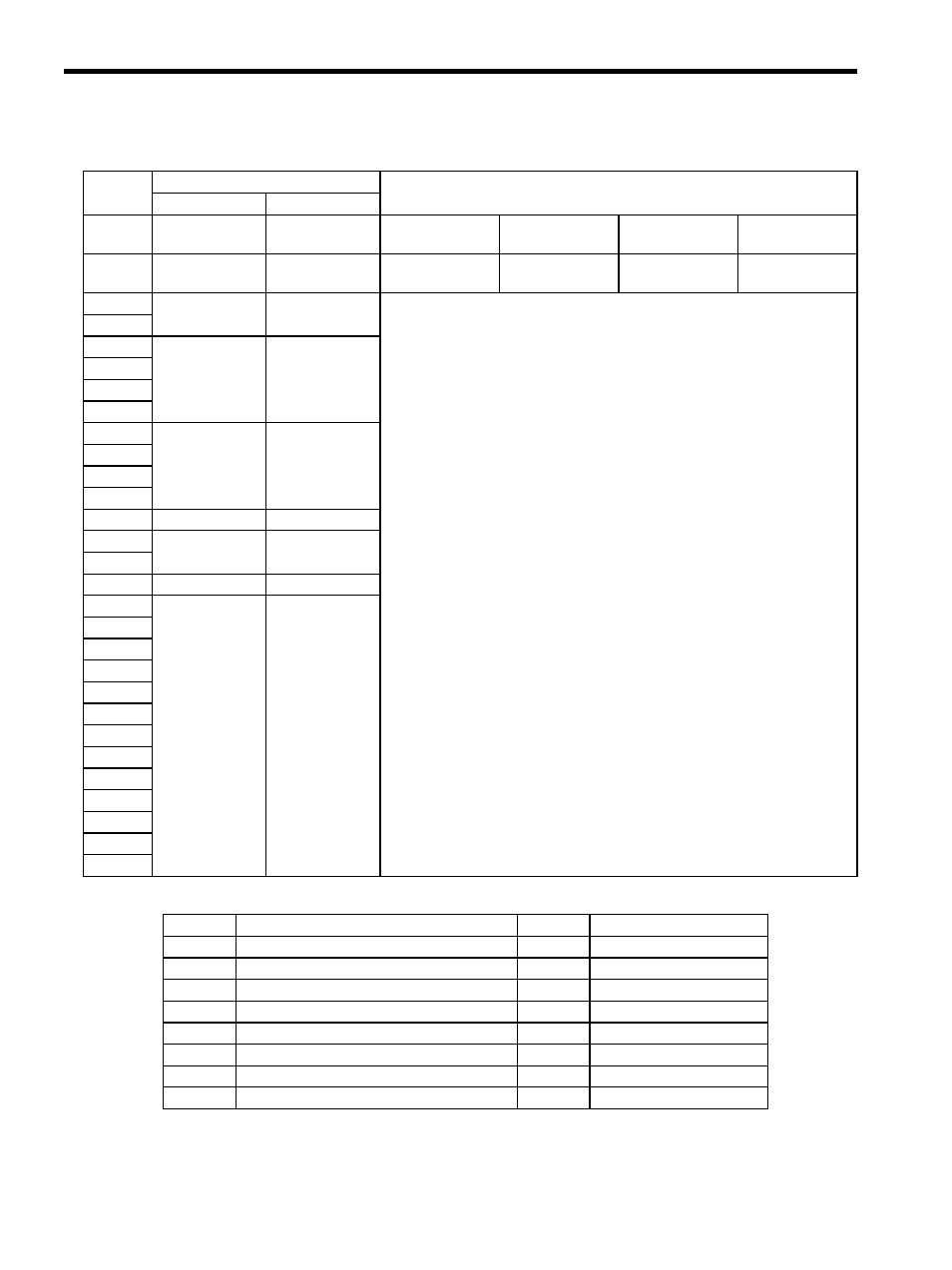
• Related Parameters
Byte
EX_POSING
Description
Command
Response
1
39H
39H
Processing
classifications
Motion command
group
Synchronization
classifications
Asynchronous
2
LT_SGN
ALARM
Processing time
Within communi-
cations cycle
Subcommand
Can be used
3
OPTION
STATUS
• Moves toward the target position (TPOS) at the target speed (TSPD). When a
latch signal is input midway, positioning is performed according to the final
travel distance for external position specified in the parameter from signal
input position. When no latch signal is input, positioning is performed for the
target position.
• Can be used during phases 2 and 3.
• A command warning will occur and the command will be ignored in the
following cases.
- During phase 1: Command warning 1 (A.95A)
- If the SERVOPACK is Servo OFF: Command warning 1 (A.95A)
- If the target speed (TSPD) exceeds the limit: Data setting warning 2 (A.94B)
• OPTION field can be used. Refer to 6.5.2 Option Field Specifications:
OPTION for details.
• The target position (TPOS) is a signed 4 bytes [reference unit]. It is set using
an absolute position in the reference coordinate system.
• The target speed (TSPD) is an unsigned 4 bytes. It is set using 0 to limit value
[reference unit/s].
• After the latch is input, any changes to the target position during motion will
be ignored.
• Use DEN (output complete) to confirm the completion of position reference
output.
• It takes 500
µs max. for the Request Latch Mode command to start.
4
5
TPOS
MONITOR1
6
7
8
9
TSPD
MONITOR2
10
11
12
13
SEL_MON 1/2
SEL_MON 1/2
14
I/O_MON
15
16
WDT
RWDT
17
For
subcommands.
Refer to 6.4
Subcommands.
For
subcommands.
Refer to 6.4
Subcommands.
18
19
20
21
22
23
24
25
26
27
28
29
Pn No.
Description
Pn No.
Description
Pn511
Input Signal Selections 5
Pn820
Latching Area Upper Limit
Pn80A
First-step Linear Acceleration Parameter
Pn822
Latching Area Lower Limit
Pn80B
Second-step Linear Acceleration Parameter
Pn80C
Acceleration Parameter Switching Speed
Pn80D
First-step Linear Deceleration Parameter
Pn80E
Second-step Linear Deceleration Parameter
Pn80F
Deceleration Parameter Switching Speed
Pn814
Final Travel Distance for External Positioning