Yaskawa SGDS Sigma III Servo Amplifier User Manual
Page 328
11.2 List of Parameters
11-13
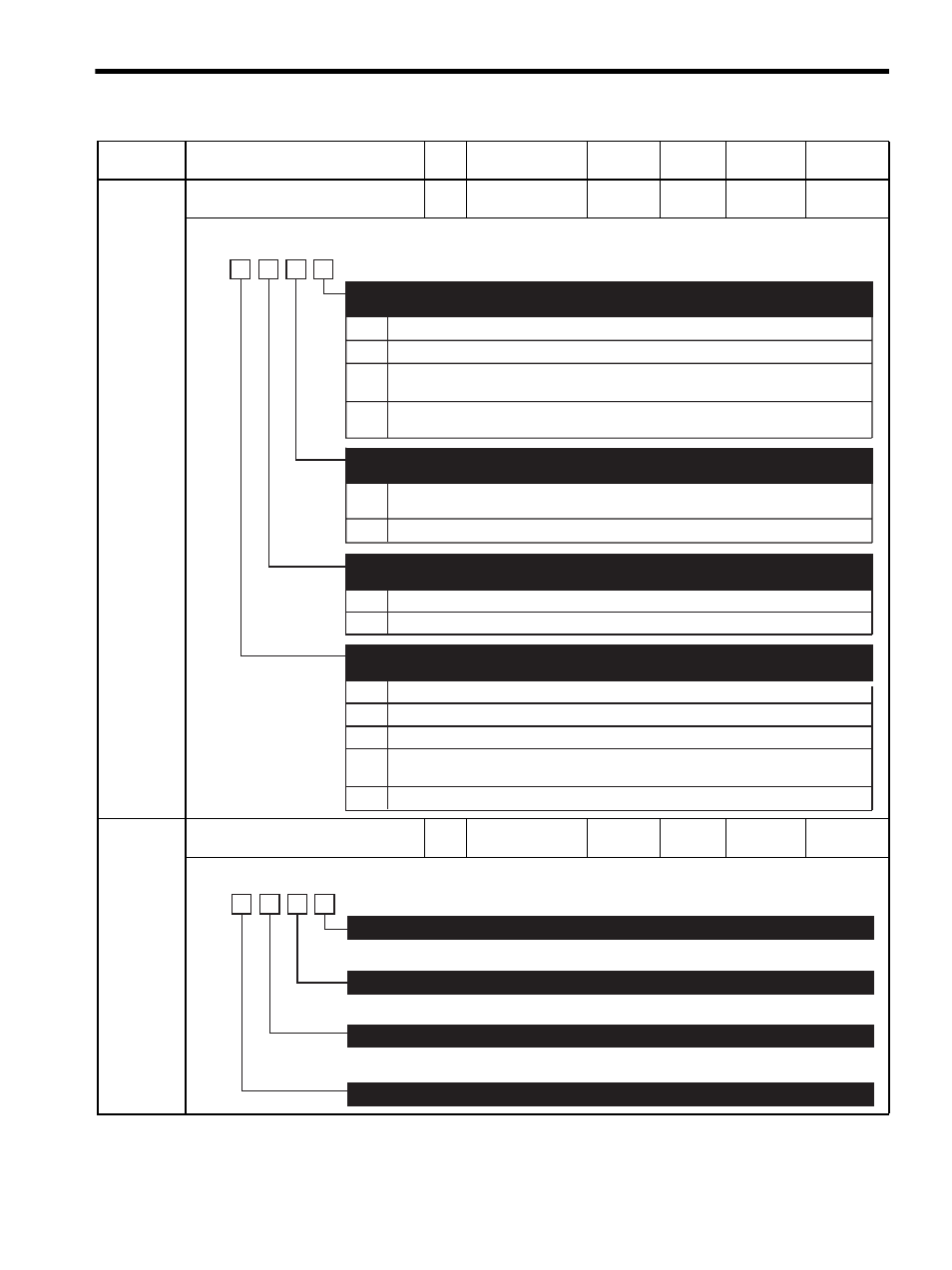
Pn002
Function Selection Application Switch
2
2
−
−
0000
∆
−
Pn004
Function Selection Application Switch
4
2
0000−1110
−
0110
∆
−
Note:
∆: Validated after a Set Up Device command is sent, when loading and using parameters at
power ON. Also validated when turning OFF and then ON the power supply again after a
Write Non-volatile Parameter (PPRM_WR) command is sent.
Parameter
No.
Name
Data
Size
Setting Range
Units
Factory
Setting
Changing
Method
Reference
Section
1
2
3
0
1
P_TLIM and N_TLIM operate as the torque limit values.
TFF operates as the torque feed forward.
Set N_TLIM to 0.
When OPTION.P_CL = 1, P_TLIM operates as the torque limit value.
When OPTION.N_CL = 1, N_TLIM operates as the torque limit value.
N/A
Set VLIM to 0.
VLIM operates as the speed limit value.
Velocity Control (VELCTRL) Option
(Refer to "6.3.30 Velocity Control.")
0
1
2
3
4
Unused.
Uses fully closed encoder pulse without phase C (incremental encoder).
Reserved (Do not change)
Uses fully closed encoder pulse without phase C as reverse rotation mode
(incremental encoder).
Reserved (Do not change)
Fully Closed Encoder Pulse Usage
(Refer to "9.4 Related Parameters.")
Torque Control (TRQCTRL) Option
(Refer to "6.3.31 Torque Control (TRQCTRL : 3DH).")
0
1
Uses absolute encoder as an absolute encoder.
Uses absolute encoder as an incremental encoder.
Absolute Encoder Usage
(Refer to "7.7.1 Selecting an Absolute Encoder, 7.7.3 Multiturn Limit Setting.")
n.
4th
digit
3rd
digit
2nd
digit
1st
digit
The set value of P_TLIM/N-TLIM is ignored. Set to "0".
0
Reserved (Do not change)
Reserved (Do not change)
Reserved (Do not change)
Reserved (Do not change)
n.
4th
digit
3rd
digit
2nd
digit
1st
digit