2) predictive control method (pn150=n.ooox) – Yaskawa SGDS Sigma III Servo Amplifier User Manual
Page 265
8 Adjustments
8.6.7 Predictive Control
8-38
(2) Predictive Control Method (Pn150=n.
X)
(a) Predictive Control for Locus Tracking (Pn150=n.
0)
The machine is controlled by following the locus of the position reference being input.
Use this control to keep the form of locus of position reference.
Note that the operation starts a few milliseconds after the command input. Therefore, the positioning time is
longer than that by the predictive control for positioning.
(b) Predictive Control for Positioning (Pn150=n.
1)
The machine is controlled by anticipating the position reference to be input.
The operation starts at the same time as the command input, which reduces the positioning time.
The locus differs from that of position reference.
For machines that easily vibrate, greater vibration may be caused upon stopping. In such case, use the
predictive control for locus tracking instead of the predictive control for positioning.
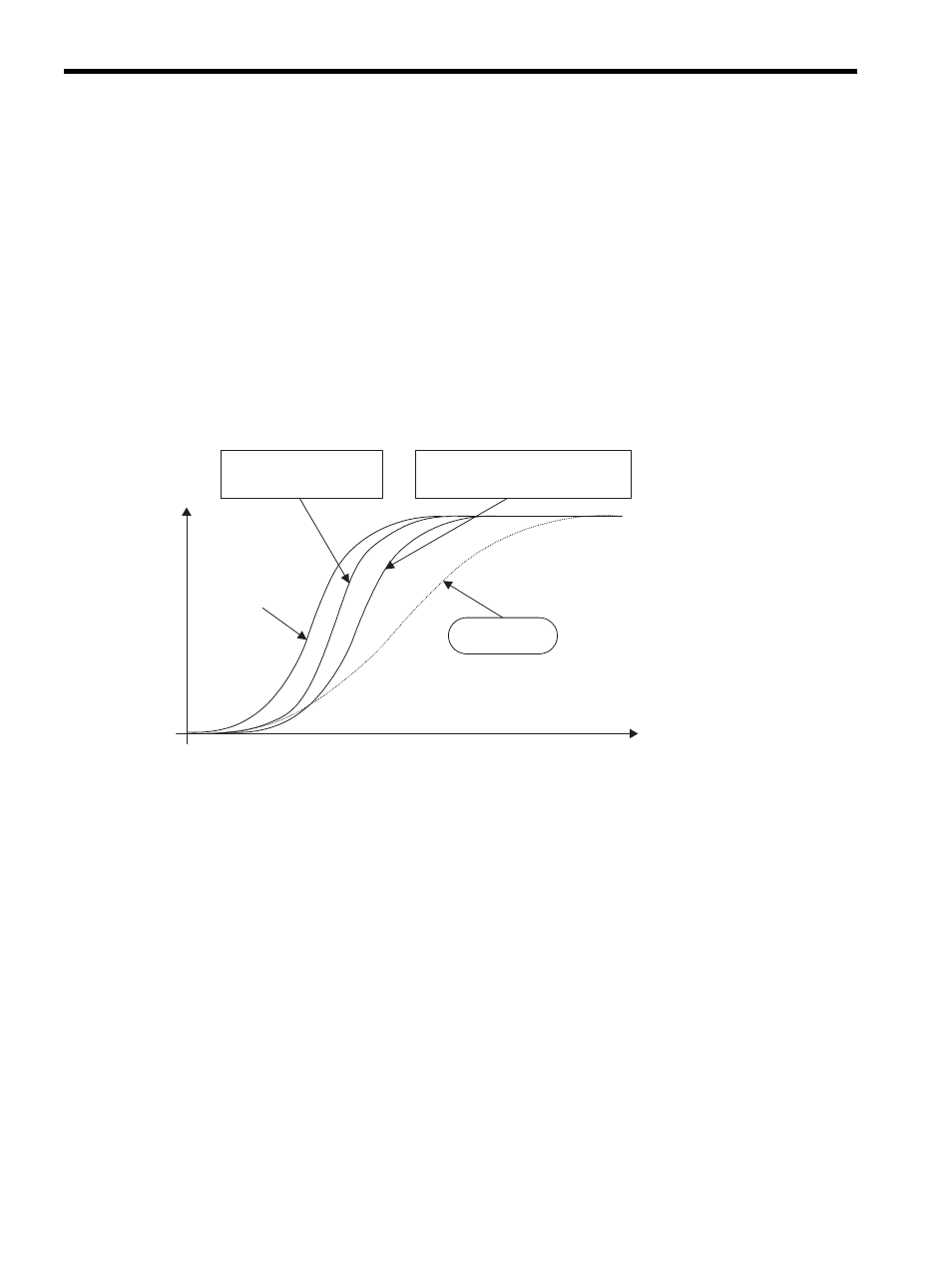
Time
Position
Position
reference
Predictive Control for
Positioning realizes
high-speed positioning
Predictive Control for Locus
Tracking follows the actual locus
of the position reference being input
Position
proportional
Control