4 parameter recording table, 4 parameter recording table -46 – Yaskawa SGDS Sigma III Servo Amplifier User Manual
Page 361
11 Appendix
11-46
11.4 Parameter Recording Table
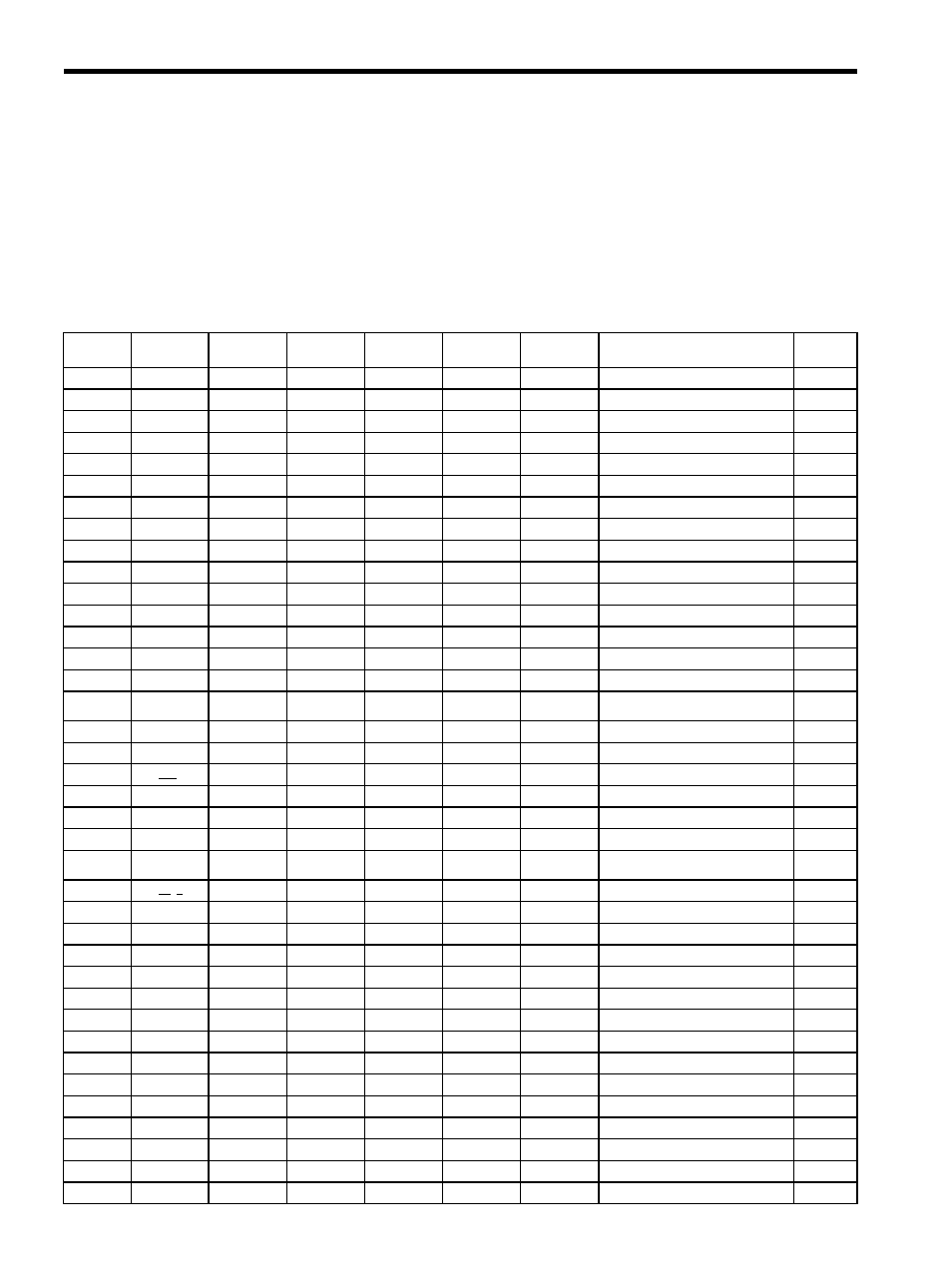
Use the following table for recording parameters. Parameter changing method is as follows:
: Can be changed at any time, and immediately validated after changing. (Called an online parameter.)
: Can be changed when DEN=1. Immediately validated after changing. Do not change when DEN = 0. Doing
so may lead to overrun (Called an offline parameter.)
∆: Validated after a Set Up Device command is sent, when loading and using parameters at power ON. Also
validated when turning OFF and then ON the power supply again after a Write Non-volatile Parameter
(PPRM_WR) command is sent.
parameter
No.
Factory
Setting
Name
Changing
Method
Pn000
0000
Function Selection Basic Switch 0
∆
Pn001
0000
Function Selection Application Switch 1
∆
Pn002
0000
Function Selection Application Switch 2
∆
Pn004
0000
Function Selection Application Switch 4
∆
Pn006
0002
Function Selection Application Switch 6
Pn007
0000
Function Selection Application Switch 7
Pn008
4000
Function Selection Application Switch 8
∆
Pn100
40.0 Hz
Speed Loop Gain
Pn101
20.00 ms
Speed Loop Integral Time Constant
Pn102
40.0/s
Position Loop Gain
Pn103
0 %
Moment of Inertia Ratio
Pn104
40.0 Hz
2nd Speed Loop Gain
Pn105
20.00 ms
2nd Speed Loop Integral Time Constant
Pn106
40.0/s
2nd Position Loop Gain
Pn107
0 RPM
Bias
Pn108
7 reference
units
Bias Addition Width
Pn109
0 %
Feed Forward Gain
Pn10A
0.00 ms
Feed Forward Filter Time Constant
Pn10B
0000
Gain Related Application Switch
∆
Pn10C
200 %
Mode Switch (torque reference)
Pn10D
0 RPM
Mode Switch (speed reference)
Pn10E
0 RPM/s
Mode Switch (acceleration)
Pn10F
0 reference
units
Mode Switch (error pulse)
Pn110
0012
Normal Autotuning Switches
∆
Pn111
100 %
Speed Feedback Compensation Gain
Pn119
50.0/s
Reference Filter Gain
Pn11A
100.0 %
Reference Filter Gain Compensation
Pn11E
100.0 %
Reference Filter Bias (Forward)
Pn11F
0.0 ms
Position Integral Time Constant
Pn12B
40.0 Hz
3rd Speed Loop Gain
Pn12C
20.00 ms
3rd Speed Loop Integral Time Constant
Pn12D
40.0/s
3rd Position Loop Gain
Pn12E
40.0 Hz
4th Speed Loop Gain
Pn12F
20.00 ms
4th Speed Loop Integral Time Constant
Pn130
40.0/s
4th Position Loop Gain
Pn131
0 ms
Gain Switching Time 1
Pn132
0 ms
Gain Switching Time 2
Pn135
0 ms
Gain Switching Waiting Time 1