1) related parameters, 36 (1) related parameters – Yaskawa SGDS Sigma III Servo Amplifier User Manual
Page 263
8 Adjustments
8.6.7 Predictive Control
8-36
(1) Related Parameters
Pn150
Predictive Control Selection Switches
Setting Range
Setting Unit
Factory Setting
Setting Validation
---
---
0210
After restart
Position
Parameter
Name
Function
Pn150
n.
0
Predictive Control Enable Do not use the Predictive Control function.
n.
1
Use the Predictive Control function.
n.
0
Predictive Control
Method
Performs Predictive Control for Locus Tracking.
This method is used for Locus Tracking Control and for
positioning for low-rigidity machines. Reduces the tracking
error by keeping the locus shape of the position reference.
n.
1
Performs Predictive Control for Positioning.
This method is used for positioning control. It operates by
anticipating the future position reference. For low-rigidity
machines, use the Predictive Control for Locus Tracking if the
vibration increases when stopping with this method.
n.
X
Reserved. (Do not change.)
n.
X
Reserved. (Do not change.)
Pn151
Predictive Control Acceleration/Deceleration Gain
Setting Range
Setting Unit
Factory Setting
Setting Validation
0% to 300%
1%
100%
Immediately
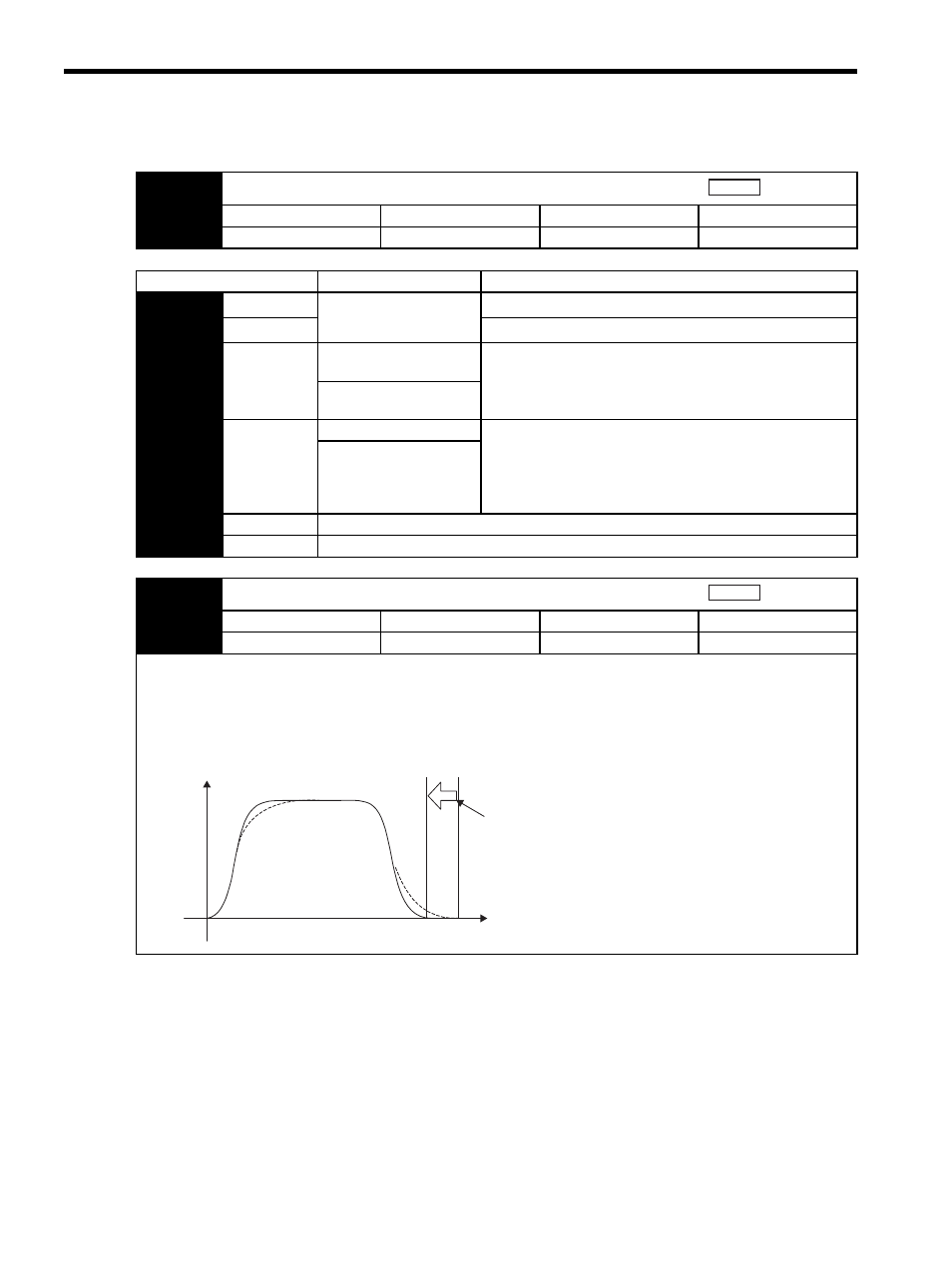
Increasing the gain setting in Pn151 has the effect of shortening the settling time. The maximum position error is not
changed significantly.
Overshooting will occur if the gain is set too high.
The following diagram shows the typical position error behavior when operating with a trapezoidal speed reference pattern.
Increasing the Predictive Control Acceleration/Deceleration Gain changes the position error behavior from the dashed line
to the solid line and shortens the settling time.
Position
Position
Error
Time
Increase the Predictive Control
Acceleration/Deceleration Gain
setting in Pn151