4 supplementary information on trial operation, 1) minimum parameters and input signals, A) parameters – Yaskawa SGDS Sigma III Servo Amplifier User Manual
Page 195: B) input signals, 2) servomotors with brakes, 4 suppl, 4 supplementary information on trial operation -6, Refer to 7.2.4
7 Operation
7.2.4 Supplementary Information on Trial Operation
7-6
7.2.4 Supplementary Information on Trial Operation
(1) Minimum Parameters and Input Signals
This section describes the minimum parameters and input signals required for trial operation.
(a) Parameters
Turn OFF power once after changing any parameter. The change will be valid when power is turned ON
again.
• Changing Servomotor Rotation Direction
Use the following parameter to reverse the direction of rotation.
(b) Input Signals
Refer to the relevant page for details on each input signal.
Input signal selection settings through parameters can be used to eliminate the need for external short cir-
cuits.
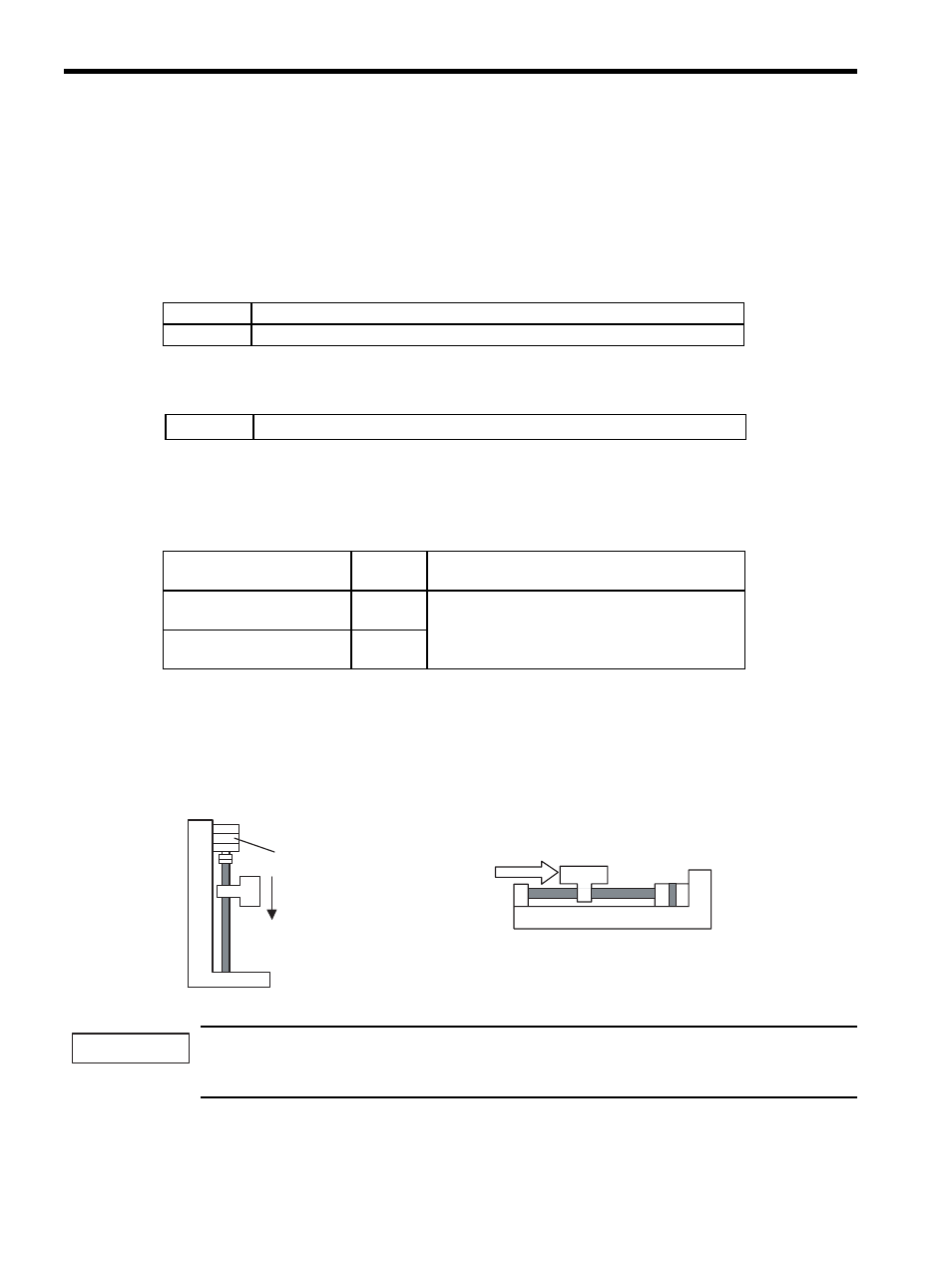
(2) Servomotors with Brakes
Use servomotors with brakes for vertical shaft applications or when external force is applied to the shaft to
prevent the shaft from rotating due to gravity or external force when power is lost. The SERVOPACK uses the
brake interlock output (/BK) signal to control holding brake operation when using servomotors with brakes.
To prevent faulty operation due to gravity or external force, make sure that the servomotor and holding
brake operate normally with the servomotor disconnected from the machine. When both of them operate
normally, connect the servomotor to the machine to start trial operation.
The following figure shows wiring for a servomotor with brakes. Refer to 7.6.2 Using the Holding Brake for
details on wiring.
Pn20E
Electronic Gear Ratio (Numerator)
See 7.4.2
Pn210
Electronic Gear Ratio (Denominator)
Pn000.0
Function Selection Basic Switches: Direction Selection
See 7.3.1
Signal Name
Pin
Number
Description
P-OT
Forward run
prohibited
CN1-7
The Overtravel Limit Switch
Refer to 7.3.2.
N-OT
Reverse run
prohibited
CN1-8
Servomotor
Holding brake
Prevents the
servomotor from
rotating due to gravity .
Servomotor
External
force
Vertical Shaft
Shaft with External Force Applied
IMPORTANT