2) machine rigidity settings for normal autotuning, Send the following data in each command field – Yaskawa SGDS Sigma III Servo Amplifier User Manual
Page 355
11 Appendix
11.3.1 Autotuning
11-40
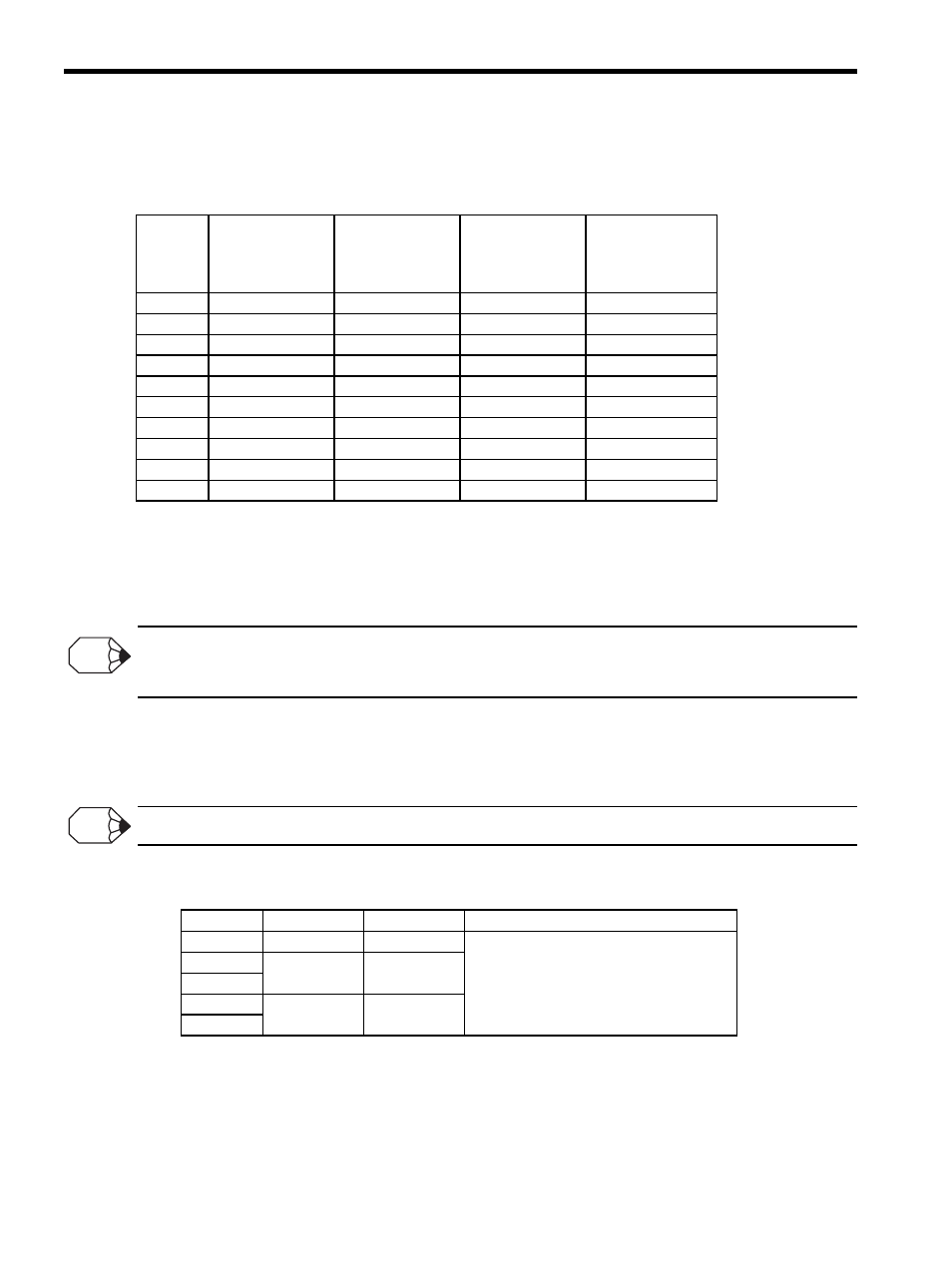
(2) Machine Rigidity Settings for Normal Autotuning
For the machine rigidity settings at the time of normal autotuning, select the target values for speed loop gain and
position loop gain of the servo system. Any of the following ten levels of rigidity can be selected.
Note: The rigidity value is factory-set to 4.
As the rigidity value is increased, the servo system loop gain increases and the time required for positioning is
shortened. If the rigidity is excessively high, however, it may cause the machine to vibrate. In that case, decrease
the set value.
The rigidity value setting automatically changes the parameters in the above table.
If parameters Pn102, Pn100, Pn101, and Pn401 are set manually with the normal autotuning function enabled, tuning is
performed with the manually set values as target values.
• Changing the Machine Rigidity Setting
The machine rigidity setting is changed using the Adjusting command (ADJ: 3EH).
The procedure for making changes is shown below.
The machine rigidity can be set also by changing the utility function Fn001 using a digital operator.
1. By setting byte 1 of the MECHATROLINK II command field to ADJ (3EH) and byte 2 to 00H, the
following command field can be set.
2. Send the following data in each command field.
Set “01H” (Data setting) in the CCMD field.
Set “2010H” in the CADDRESS field.
Set 1 to 10 in the CDATA field.
3. CMDRDY of STATUS is set to 1, and CADDRESS and CDATA of the response are confirmed to be the
same as those of the command. It takes one second until CMDRDY is set to 1.
Machine
Rigidity
Setting
Fn001
Position Loop
Gain
[S
-1
]
Pn102
Speed Loop Gain
[Hz]
Pn100
Speed Loop Inte-
gral Time Con-
stant [0.01ms]
Pn101
Torque Reference
Filter Time Con-
stant [0.01ms]
Pn401
1
15
15
6000
250
2
20
20
4500
200
3
30
30
3000
130
4
40
40
2000
100
5
60
60
1500
70
6
85
85
1000
50
7
120
120
800
30
8
160
160
600
20
9
200
200
500
15
10
250
250
400
10
INFO
Command
Response
5
CCMD
CANS
CCMD: Command
CANS: Answer
CADDRESS: Setting/reference address
CDATA: Setting/reference data
6
CADDRESS
CADDRESS
7
8
CDATA
CDATA
9
INFO