3) adjustment procedure, 4) application restriction, 39 (3) adjustment procedure – Yaskawa SGDS Sigma III Servo Amplifier User Manual
Page 266
8.6 Servo Gain Adjustment Functions
8-39
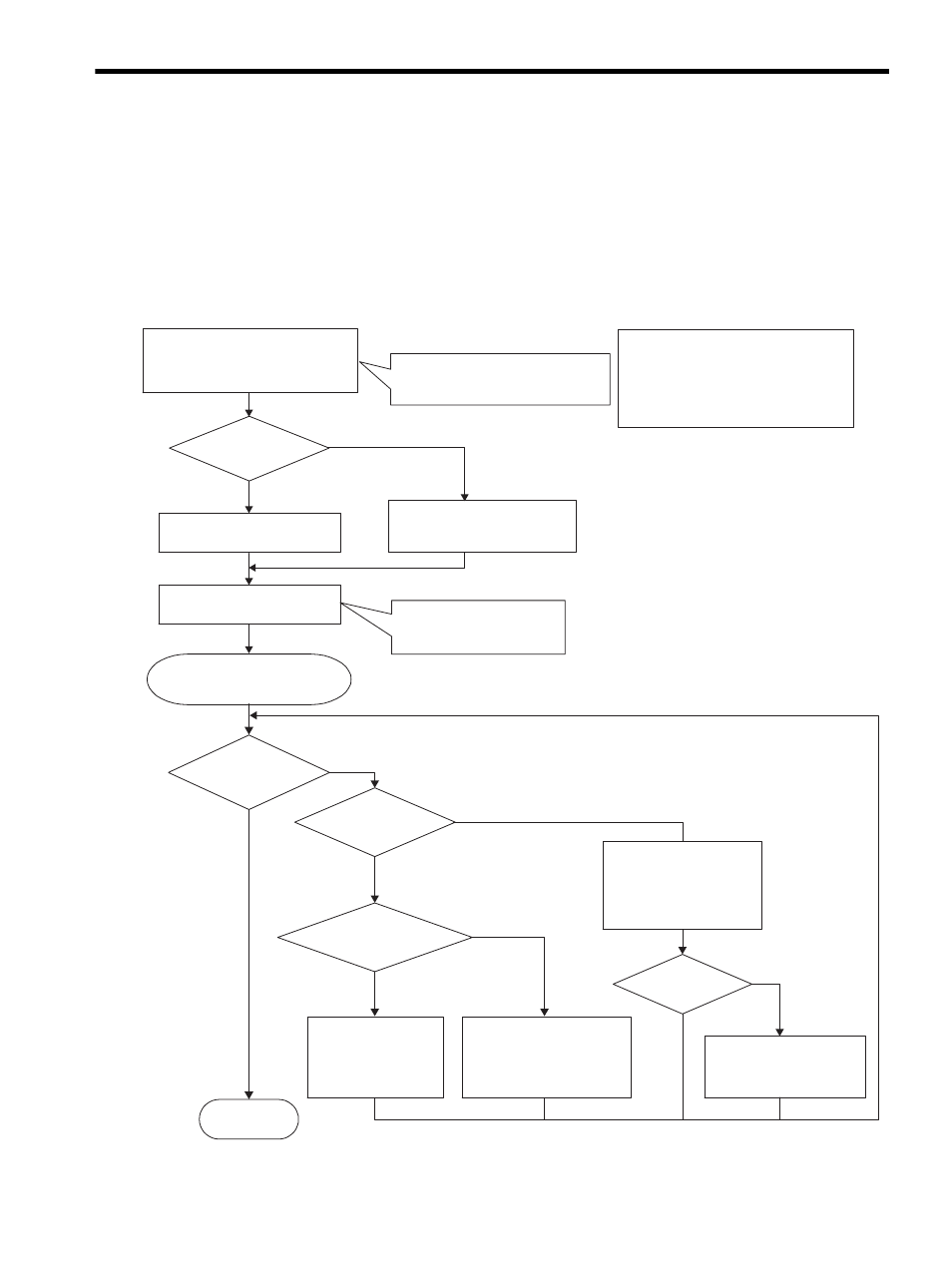
(3) Adjustment Procedure
Use the procedure shown in the following flowchart to adjust the Predictive Control function.
1. Adjustment by normal control
Use the functions such as autotunings and one-parameter autotuning.
2. Predictive control selection switch setting
Set the predictive control selection switch to enable the predictive control. Turn OFF and ON the power
to validate the setting.
3. Adjustment of predictive control adjusting parameters
If necessary, adjust the predictive control related parameters, confirming the response.
(4) Application Restriction
Advanced Autotuning (Fn017) is disabled while the Predictive Control function is being used (Pn150.0 = 1).
With the Predictive Control function
disabled, use autotuning or manual
gain adjustment to adjust the servo
gain to increase response performance.
Enable the Predictive Control
function (set Pn150.0 = 1) and
turn the power OFF and ON again.
Set the Predictive Control Method
to "Predictive Control for
Positioning." (Pn150.1 = 1)
Set the Predictive Control Method
to "Predictive Control for Locus
Tracking." (Pn150.1 = 0)
Operation with the
Predictive Control function’s
basic adjustments.
Is Positioning
Control or Locus
Tracking Control
being used?
Locus Tracking Control
Positioning Control
The position loop gain (Pn102)
will be referenced and Predictive
Control will be set automatically.
Fn01A (One-parameter Autotuning),
Fn017 (Advanced Autotuning), and
others can be used.
Related parameters are:
Pn150 (Predictive Control Selection Switch),
Pn151 (Predictive Control Acceleration
Deceleration Gain),
Pn152 (Predictive Control Weighting Ratio),
and Pn102 (Position Loop Gain).
Is the control
performance satisfactory
or at its adjustable
limit ?
End
The settling time reduced.
The tracking error reduced
Within the range not to
cause overshooting,
increase
Pn151: Predictive control
acceleration/deceleration
gain.
Within the range not to cause
overshooting and vibration in
torque wave form, increase
Pn152: Predictive control
weighting ratio.
The performance
improved?
No overshooting
Checking overshooting by
position error, reduce
Pn151: Predictive control
acceleration/deceleration gain,
or Pn152: Predictive control
weighting ratio
No overshooting?
Checking overshooting by
position error, reduce
Pn102: Position loop gain.
No
Yes
No
Yes
No overshooting
Tracking error reduced
Performance improved
Settling time reduced