Drive status structure, Logic control structure – Rockwell Automation 2100-GK61 DeviceNet to SCANport User Manual
Page 79
Publication 2100-UM001B-EN-P – January 2001
Ladder Logic Programming—Including Reading Inputs
5-5
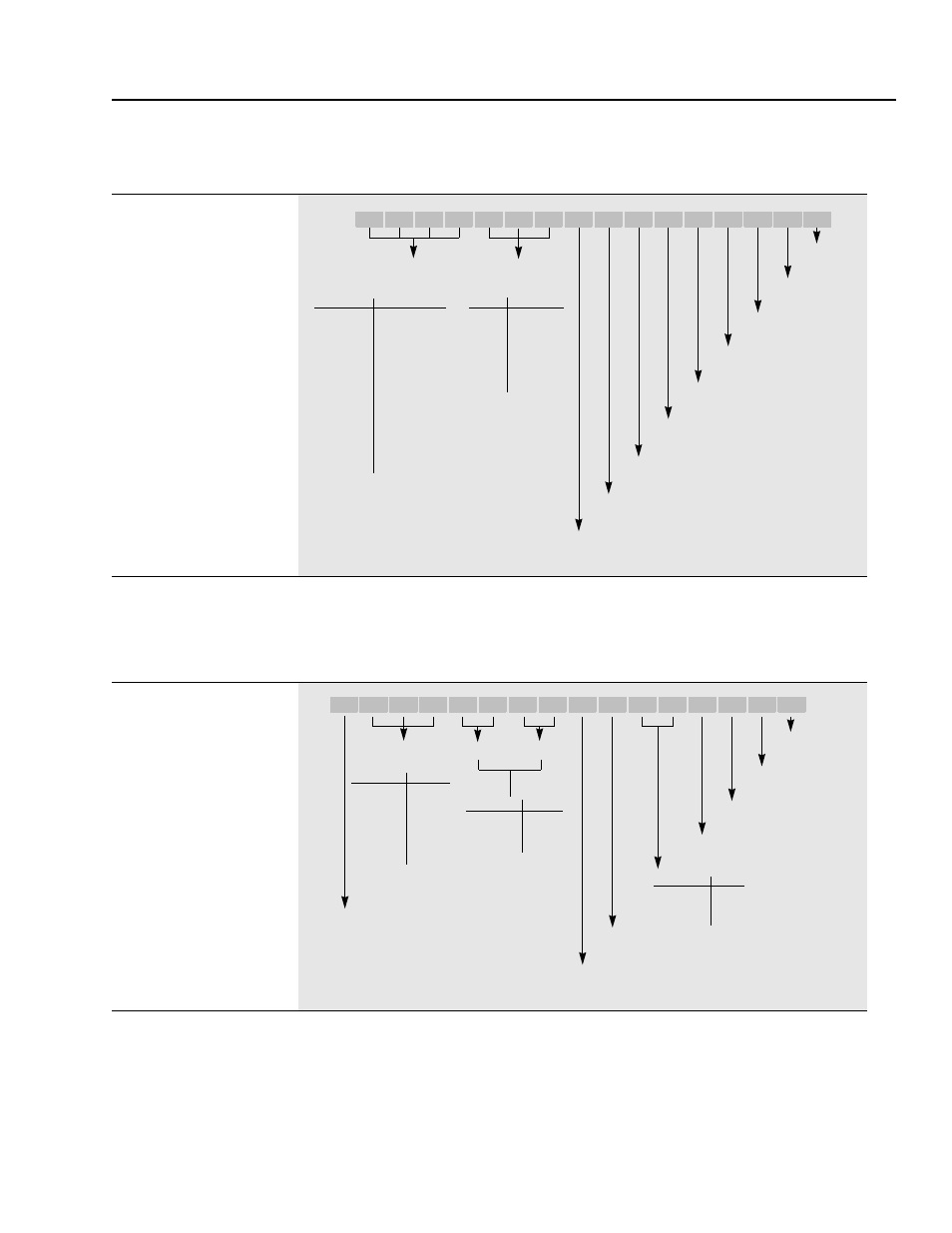
Drive Status
Structure
This provides the drive status
information that will be sent to
the logic controller
’
s input im-
age table when the
Communication Module is set
to control the drive.
Bit 15
Bit 13Bit 12Bit 11Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Reference 15 14 13 12
Freq Select 1 0
0
0
0
Preset Freq 1 0
0
0
1
Preset Freq 2 0
0
1
0
Preset Freq 3 0
0
1
1
Preset Freq 4 0
1
0
0
Preset Freq 5 0
1
0
1
Preset Freq 6 0
1
1
0
Preset Freq 7 0
1
1
1
Freq Select 2 1
0
0
0
Adapter 1
1
0
0
1
Adapter 2
1
0
1
0
Adapter 3
1
0
1
1
Adapter 4
1
1
0
0
Adapter 5
1
1
0
1
Adapter 6
1
1
1
0
Jog Frequency1
1
1
1
Local
11 10 9
TB3
0
0
0
1
0
0
1
2
0
1
0
3
0
1
1
4
1
0
0
5
1
0
1
6
1
1
0
Unused 1
1
1
Bit 14
Running
1 = Running
0 = Not Run-
Enabled
1 = Enabled
0 = Not En-
Command Di-
rection
Accelerating
1 = Accelerating
0 = Not Accelerat-
Rotating Direc-
tion
Decelerating
1 = Decelerating
0 = Not Decelerat-
Alarm
1 = Alarm
0 = No
At Speed
1 = At Speed
0 = Not at Speed
Fault
1 = Faulted
0 = Not Faulted
Reference
ID
Local Adapter
ID
Logic Control
Structure
This information provides the
control logic information that is
sent to the drive through the
logic controller
’
s output image
table when the Communication
Module is set to control the
drive.
Bit 15
Bit 13Bit 12Bit 11Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Bit 14
Direction
5
4
No Command0
0
Forward
0
1
Reverse
1
0
Hold Direction1
1
Time
9/11 8/10
No Command0
0
Time 1
0
1
Time 2
1
0
Hold Time
1
1
Reference 14 13 12
No Command0 0
0
Freq Select 10 0
1
Freq Select 20 1
0
Preset Freq 30 1
1
Preset Freq 41 0
0
Preset Freq 51 0
1
Preset Freq 61 1
0
Preset Freq 71 1
1
Start
1 = Start
0 = Not Start
Stop
1 = Stop
0 = Not Stop
Jog
1 = Jog
0 = Not Jog
Clear Faults
1 = Clear Faults
0 = Not Clear
Local
1 = Local Lockout
0 = Not Local
MOP Increment
1 = Increment
0 = Not Increment
MOP Decrement
1 = Decrement
0 = Not Decrement
Reference Se-
Decel
Accel