6 using the modbus master function, 6 using the modbus master function -12, Setting the serial communication – Yokogawa Removable Chassis DX1000N User Manual
Page 106: Setting the modbus master
2-12
IM 04L41B01-17E
2.6 Using the Modbus Master Function
The DX is used as a Modbus master.
For the Modbus specifications, see section 6.3.
Setting the Serial Communication
Select
Modbus-M as a protocol on the Basic settings. For detail, see section 2.4, “Setting
the Serial Communication.”
Setting the Modbus Master
◊ Press
MENU (to switch to setting mode), hold down FUNC for 3 s (to switch to basic
setting mode), and select the
Menu tab > Communication (Serial) > Modbus
master > Basic settings or Command settings.
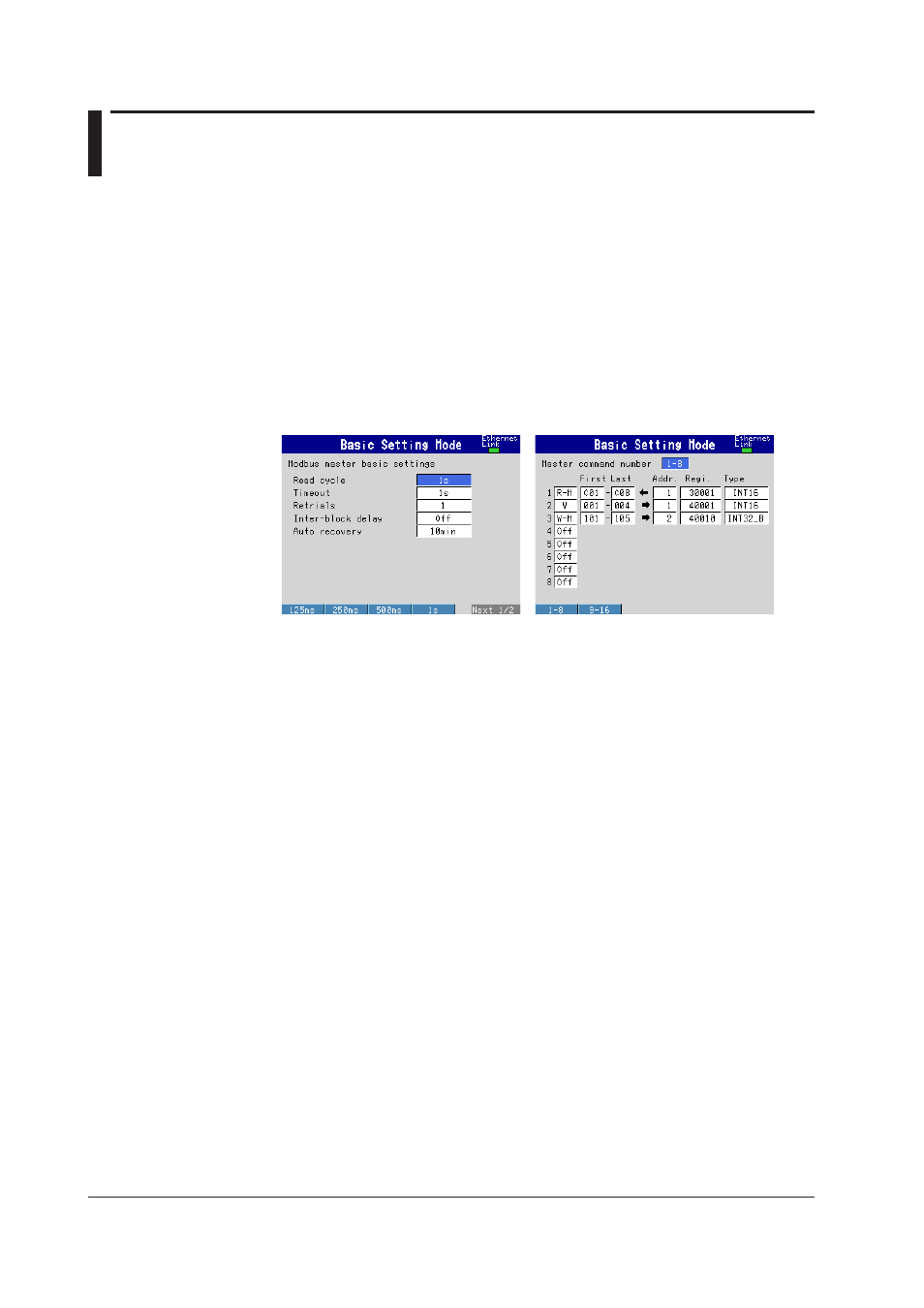
Basic settings
Command settings
Basic settings
• Read cycle
Set the read cycle to 125ms, 250ms, 500ms, 1s, 2s, 5s, or 10s.
• Timeout
Set the timeout value to 125 ms, 250 ms, 500 ms, 1 s, 2 s, 5 s, 10 s, or 1 min. The
timeout value is the maximum amount of time the DX waits for a response from the
specified slave after the DX sends a command.
• Retrials
Set the number of retrials when there is no response from the slave. Select Off, 1, 2, 3,
4, 5, 10, or 20.
• Inter-block delay
Set the amount of time the DX waits after receiving a response to send the next
command. Set the amount of time to Off, 5 ms, 10 ms, 15 ms, 45 ms, or 100 ms.
• Auto recovery
Set the auto recovery time from communication halt. Select Off, 1min, 2min, 5min,
10min, 20min, 30min, or 1h.
Command settings
• Master command number
Select 1-8 or 9-16 for the command numbers to be configured.
• Command type
Set the transmitted command type to Off, R, R-M, W, W-M, or E-M.
R: Read to the external input channel (16-bit signed integer type) from the slave.
R-M: Read to the communication input data (32-bit floating point type) from the slave.
W: Write the measurement channel (16-bit signed integer type) to the slave.
W-M: Write the measurement channel (32-bit signed integer type) to the slave.