Yaskawa DR2 Sigma Servo User Manual
Page 97
APPLICATIONS OF Σ-SERIES PRODUCTS
3.2.5 Using Electronic Gear cont.
84
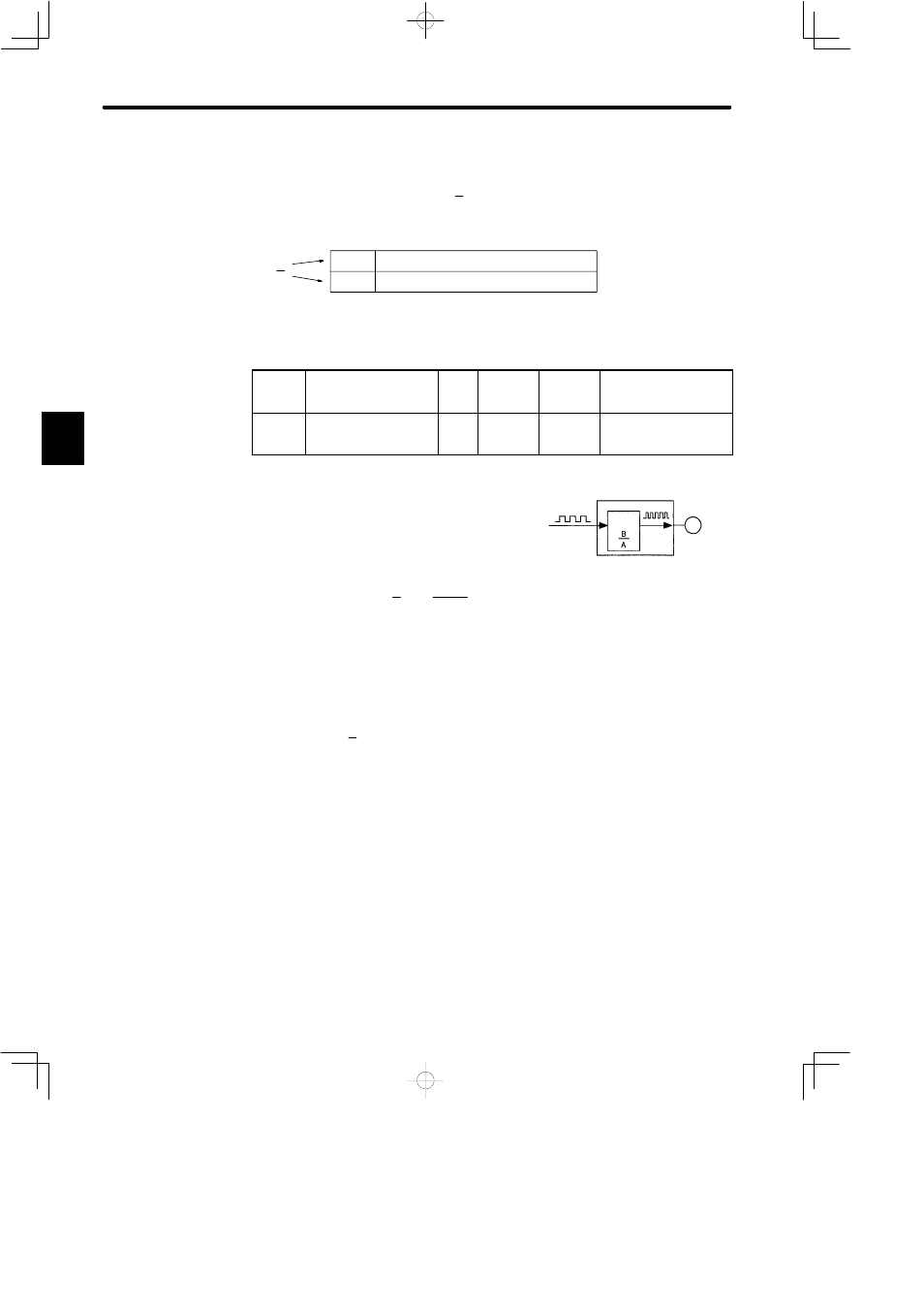
f) Set the electronic gear ratio in the user constants below.
Reduce the electronic gear ratio
B
A
to their lowest terms so that both A and B are an
integer smaller than 65535, then set A and B in the following user constants.
B
A
Cn-24
RATB Electronic gear ratio (numerator)
Cn-25
RATA Electronic gear ratio (denominator)
This is all that is required to set the electronic gear.
Cn-24
RATB
Electronic Gear Ratio
(Numerator)
Unit:
None
Setting
Range: 1
to 65535
Factory
Setting: 4
For Position
Control Only
Cn-25
RATA
Electronic Gear Ratio
(Denominator)
Unit:
None
Setting
Range: 1
to 65535
Factory
Setting: 1
For Position
Control Only
These user constants are for position control only.
Set the electronic gear ratio according to machine
specifications.
Electronic gear ratio
B
A
= Cn-24
Cn-25
B = [(Number of encoder pulses) x 4] x [Motor shaft rotating speed]
A = [Load travel distance per revolution of load shaft (Reference unit)] x [Load shaft
rotating speed]
Note that the user constant settings must meet the following condition:
0.01 ≤
B
A
≤ 100
3
Input
reference
pulse
Servopack
Servomotor
Electro-
nic gear